ブログランキングに参加しています。
おだててみると、ナニカオモシロイことが起きるかも知れません。
モチロン保証はいたしませんが。
写真はダウンロード可能です。お気に召した写真があれば、ご自由にお使い下さい。
ただし、写真も著作権の放棄はしておりません。
Raspberry Pi 2+Xubuntu で#rosbook_jpをたどる。 [ROS on Raspberry Pi2]
タイトルが、おかしいのはちょっとした実験なのでお許しいただきたい。
先に行った、Raspberry Pi 2+Xubuntu でROS Jadeを試す作業を再開することにした。ubuntu MATE にROS desktopをインストールできていないためである。地味な環境では初心者はやる気がでないもんね。
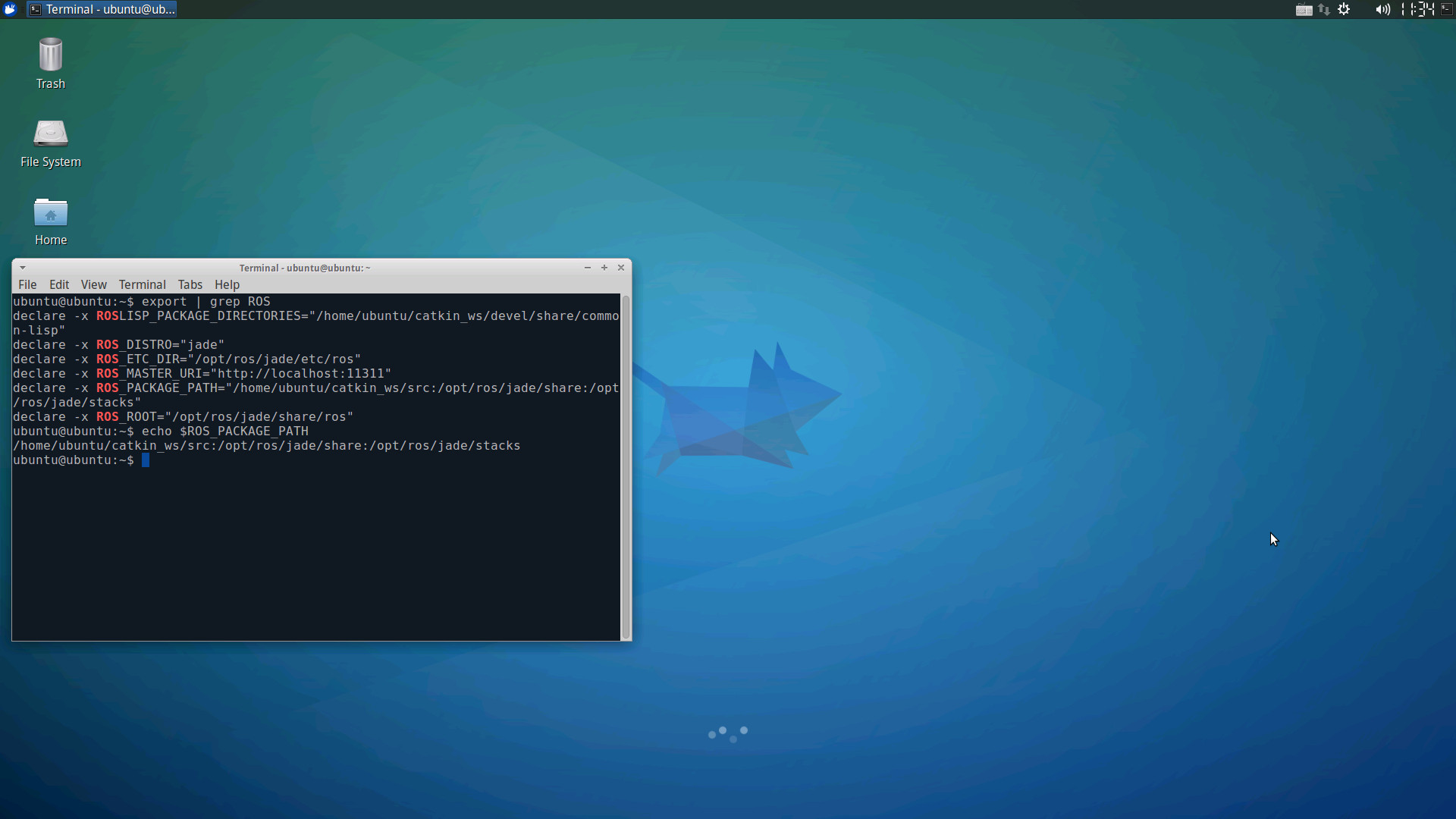
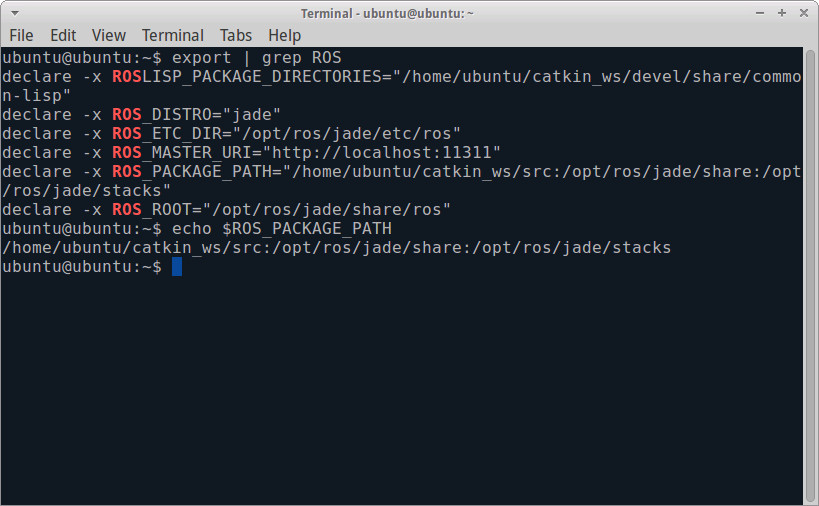
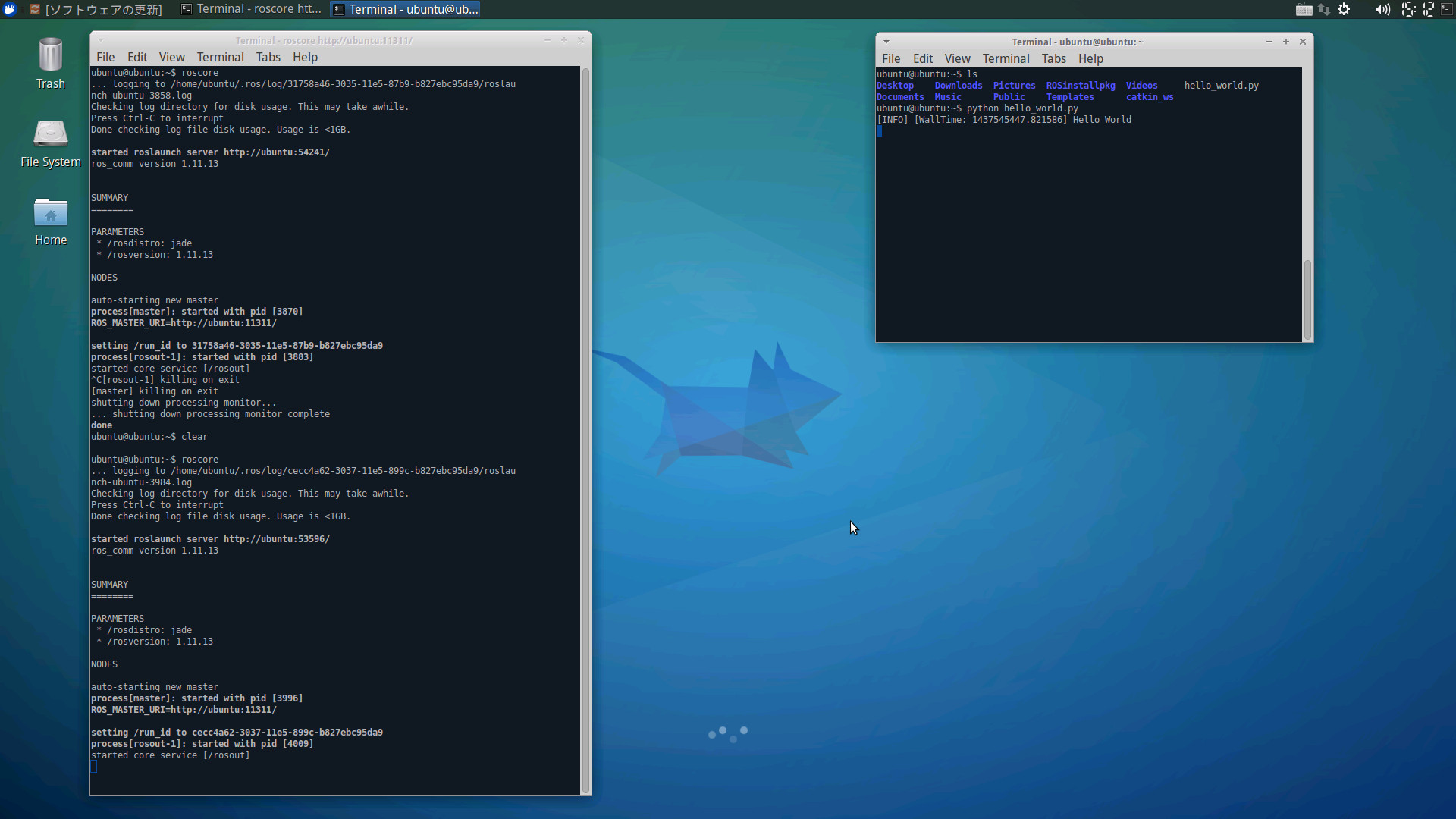
さて、前回同様に、まずは環境変数の確認だ。結果画面は下の通り。画像重複はXubuntuの素朴なデスクトップをご覧いただきたかったからである。

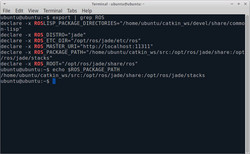
とりあえず、問題なさそうだ。
つぎは、参考書の
第6章「ROS」で「Hello World」
を試す。
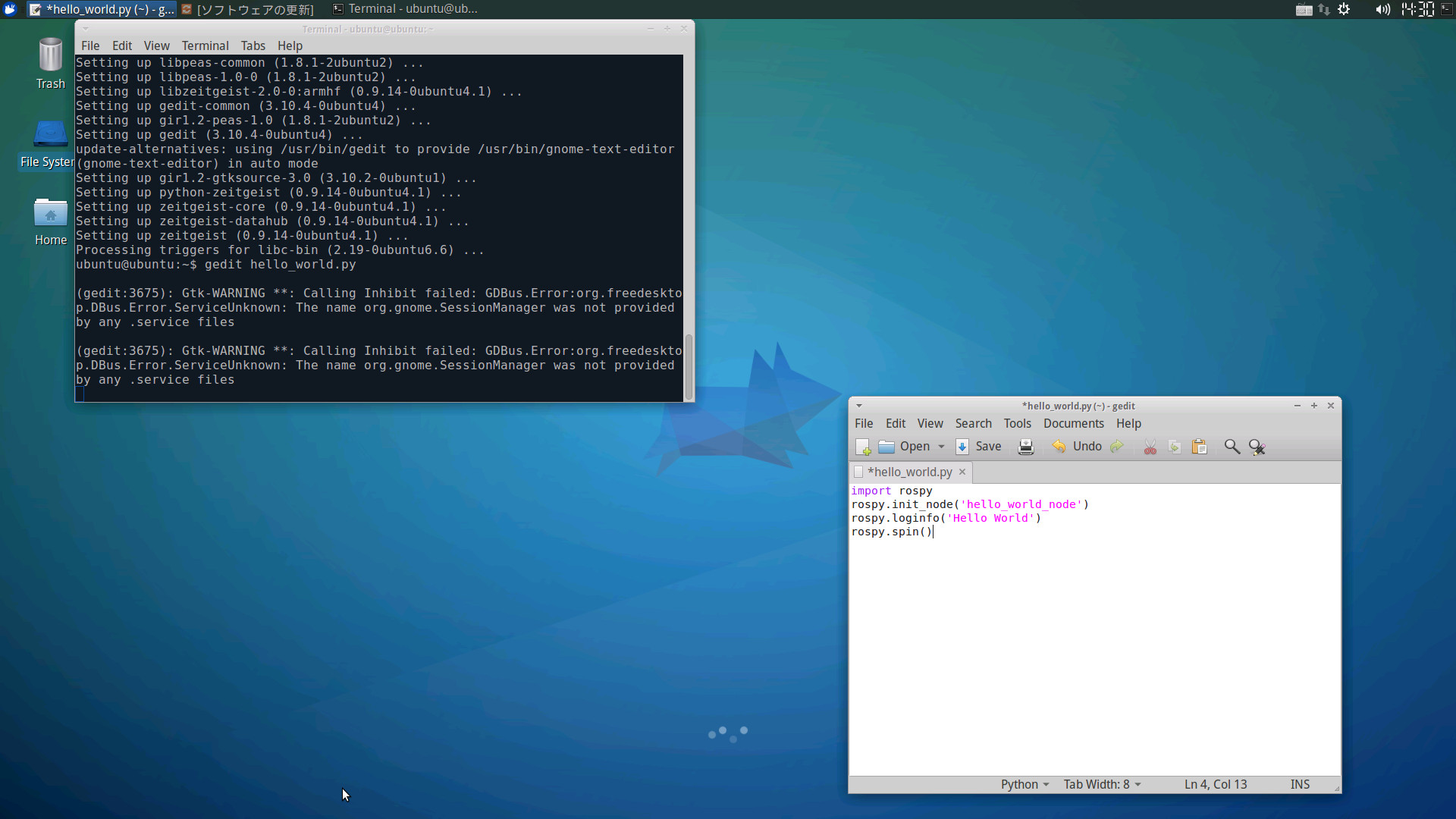
geditのインストールからはじめたが、このエディタで作ったファイルをhome直下に置くで素人の浅はかさが露呈した。/home/ubuntu に置けば良いのだった。れーせーに考えれば、エディタで作った「hello_world.py」ファイルの置いてあるディレクトリを指定して、
$ python hello_world.py
するといいわけだ。とは言え、一応確認してみたらおkだった。なんてところが初心者のツライところ。
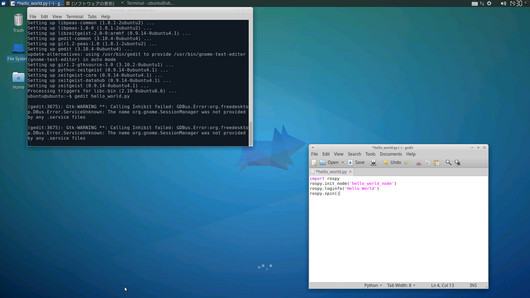
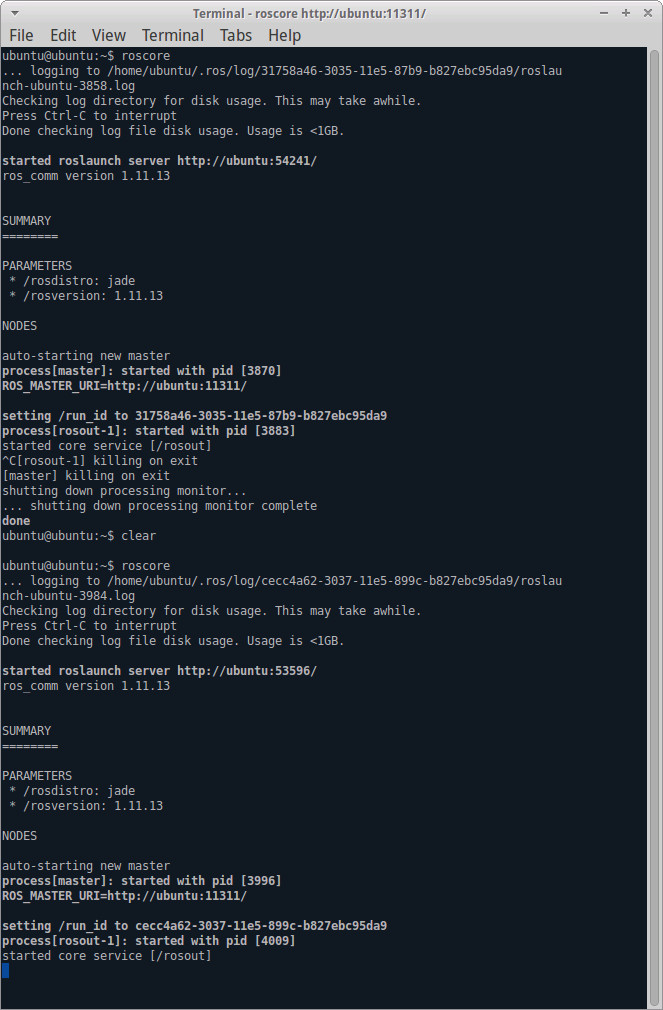
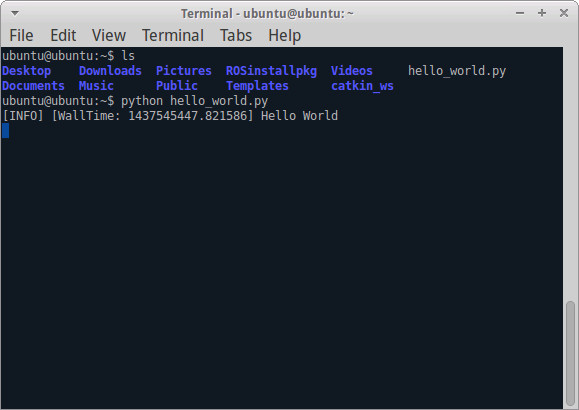
それぞれの拡大画像は下の通り。
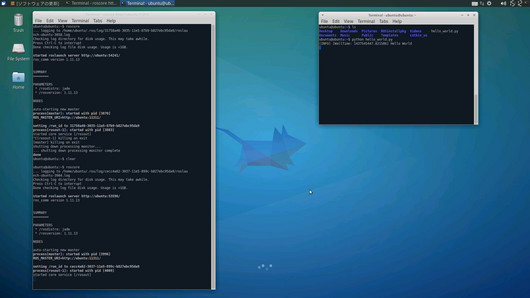
roscore起動
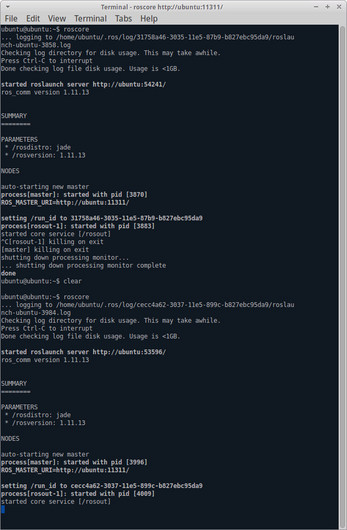
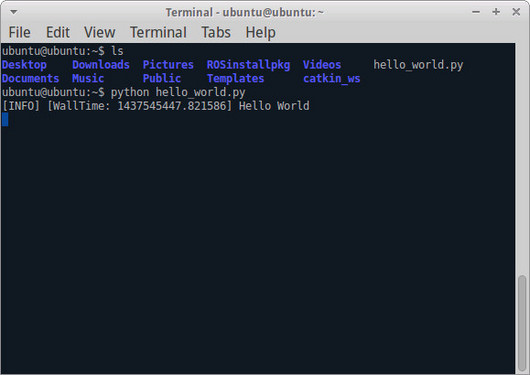
別のターミナルで「Hello World」の表示を確認。
これで、参考書↓の第一部終了。
")



先に行った、Raspberry Pi 2+Xubuntu でROS Jadeを試す作業を再開することにした。ubuntu MATE にROS desktopをインストールできていないためである。地味な環境では初心者はやる気がでないもんね。
さて、前回同様に、まずは環境変数の確認だ。結果画面は下の通り。画像重複はXubuntuの素朴なデスクトップをご覧いただきたかったからである。
とりあえず、問題なさそうだ。
つぎは、参考書の
第6章「ROS」で「Hello World」
を試す。
geditのインストールからはじめたが、このエディタで作ったファイルをhome直下に置くで素人の浅はかさが露呈した。
$ python hello_world.py
するといいわけだ。とは言え、一応確認してみたらおkだった。なんてところが初心者のツライところ。
それぞれの拡大画像は下の通り。
roscore起動
別のターミナルで「Hello World」の表示を確認。
これで、参考書↓の第一部終了。
カメさんはROS-Commについて来ない [ROS on Raspberry Pi2]
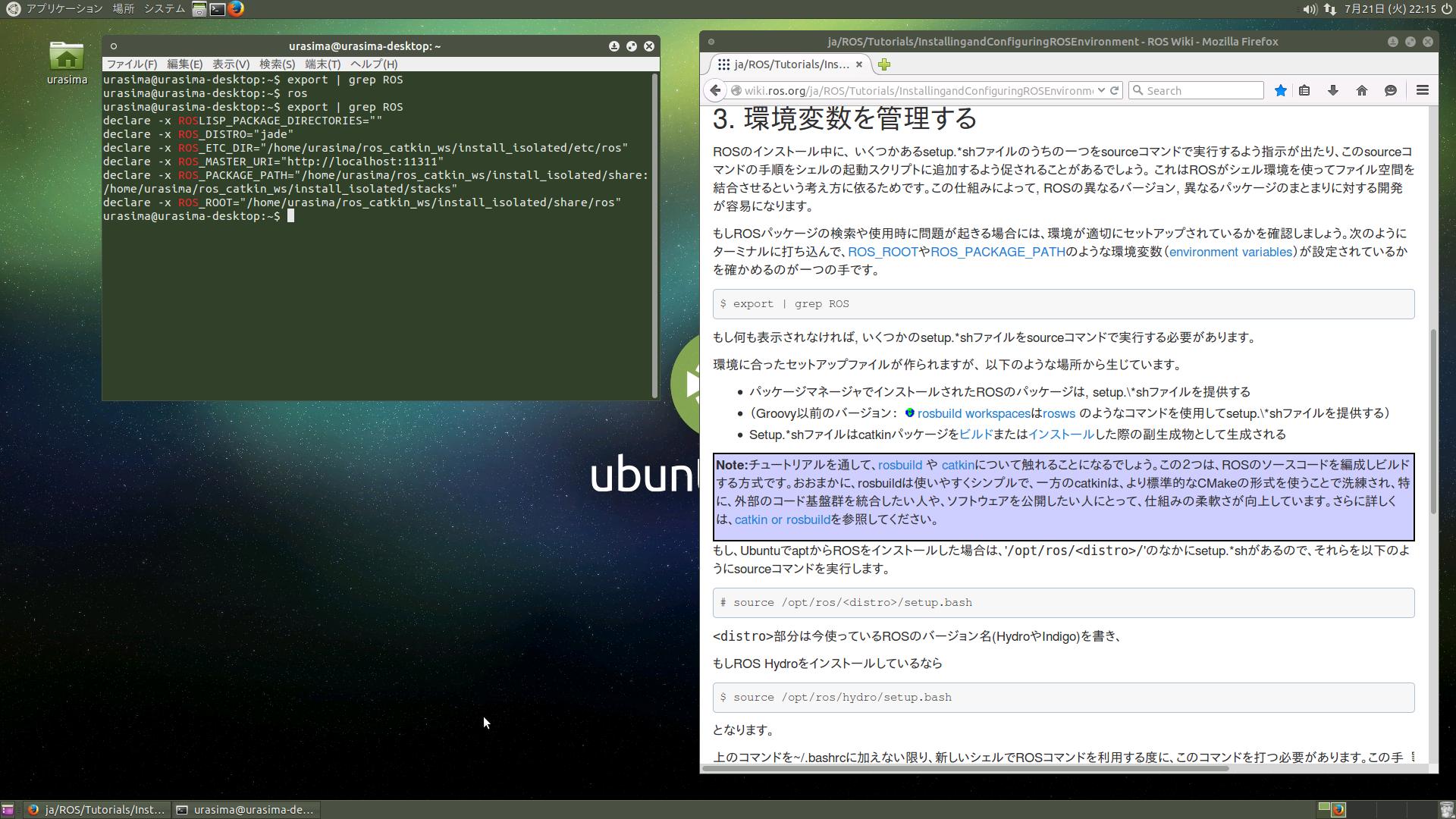
前回、ubuntu MATE 15.04をRaspberry Pi 2にインストールし、さらに[ ROS-Comm: (Bare Bones) ROS package, build, and communication libraries. No GUI tools. ] をインストールした後、roscore の起動確認のみで止まっていたので、まずはクソマジメに日本語のチュートリアルをのぞいてみた。現状は項目2に相当する[ ROS-Comm ]のインストールが終わっているにすぎない。次は「項目3.環境変数を管理する」だが ソースからインストールしたため微妙にディレクトリの名前が違ったりする。このチュートリアルにはlinux初心者にはチンプンカンプンな言葉も出現している。
ja/ROS/Tutorials には、
Linux初心者である場合: linuxの一般的なコマンドラインツールのクイックチュートリアルをまずやっておくと、ROSのチュートリアルを進めていく助けになるでしょう.
と書かれている。正論である。しかし、その前に環境セットアップは終わらせたいというのが人情であろう。ええい、やっちゃえ!の結果はごらんの通り。alias='source ~/ros_catkin_ws/install_isolated/setup.bash' を~/.bashrcに追加したので、$ ros と入力すれば、$ export | grep ROSで表示もでるし、$ echo $ROS_PACKAGE_PATHでも確認(スクリーンショットを忘れてしまった)はできた。

もちろん、カメさんはROS-Commについて来ない。最初から判ってはいたがサビシイ。どうやってパッケージ追加すればいいのかワカランもんね。とりあえず、下の参考書にそってどこまでできるかを試そうとしているので、ubuntu MATE での作業はここで一時中断する。やはり、ソースからインストールするのは のっとりこめんでっど である。
とーしろーのくせに、と思われたかたもいらっしゃるかと存ずるが、とーしろーだから こゆことするんだもんね。
ja/ROS/Tutorials には、
Linux初心者である場合: linuxの一般的なコマンドラインツールのクイックチュートリアルをまずやっておくと、ROSのチュートリアルを進めていく助けになるでしょう.
と書かれている。正論である。しかし、その前に環境セットアップは終わらせたいというのが人情であろう。ええい、やっちゃえ!の結果はごらんの通り。alias='source ~/ros_catkin_ws/install_isolated/setup.bash' を~/.bashrcに追加したので、$ ros と入力すれば、$ export | grep ROSで表示もでるし、$ echo $ROS_PACKAGE_PATHでも確認(スクリーンショットを忘れてしまった)はできた。

もちろん、カメさんはROS-Commについて来ない。最初から判ってはいたがサビシイ。どうやってパッケージ追加すればいいのかワカランもんね。とりあえず、下の参考書にそってどこまでできるかを試そうとしているので、ubuntu MATE での作業はここで一時中断する。やはり、ソースからインストールするのは のっとりこめんでっど である。
とーしろーのくせに、と思われたかたもいらっしゃるかと存ずるが、とーしろーだから こゆことするんだもんね。
Installing from source [ROS on Raspberry Pi2]
今日はubuntu MATE 15.04をRaspberry Pi 2にインストール後(これはカンタンだった)、Installing from sourceを頼りに[ ROS-Comm: (Bare Bones) ROS package, build, and communication libraries. No GUI tools. ] をインストールしてみた。作業時間はほぼ一日がかりであった(途中で買い物に行ったり食事したり、酒飲んだりしてるけど)。インストール作業は先ほど終了しroscoreが起動するところまでは確認した。証拠写真はこんな具合です。

ほんとは、[ Desktop Install (recommended): ROS, rqt, rviz, and robot-generic libraries ] のインストールに何度かトライしていたのだがビルド中にエラー頻発、さらに終盤で発生したエラーを回避する方法が見つからず(初心者なので考えることができない)作業中断。まともなマシンを準備すべきだとゆうことは最初から情報として得てはいたが、ビンボーニンとしてはどうしてもRaspberry Pi 2に入れてみたかったのだ。
インストール作業に現を抜かして3週間も潰してしまった。ROSの学習にXubuntu と ubuntu MATEのどちらを使うかこれからいろいろやってみるが、Raspberry Pi 2でROSを学習しようとするのは賢い選択ではないが、ビンボーニンの選択としては悪くないように思う。

ほんとは、[ Desktop Install (recommended): ROS, rqt, rviz, and robot-generic libraries ] のインストールに何度かトライしていたのだがビルド中にエラー頻発、さらに終盤で発生したエラーを回避する方法が見つからず(初心者なので考えることができない)作業中断。まともなマシンを準備すべきだとゆうことは最初から情報として得てはいたが、ビンボーニンとしてはどうしてもRaspberry Pi 2に入れてみたかったのだ。
インストール作業に現を抜かして3週間も潰してしまった。ROSの学習にXubuntu と ubuntu MATEのどちらを使うかこれからいろいろやってみるが、Raspberry Pi 2でROSを学習しようとするのは賢い選択ではないが、ビンボーニンの選択としては悪くないように思う。
Ubuntu ARM install of ROS Jade [ROS on Raspberry Pi2]
前回Raspberry Pi 2にXubuntuをインストールし[ROS Indigo-Igloo]を試した際、てきとーに作業したためROSのパッケージが不足していたようで、カメさんは出てきたが、この参考書の続きを試せなかった。
ROSではじめるロボットプログラミング―フリーのロボット用「フレームワーク」 (I・O BOOKS)
いかんせん、初心者なのでどのパッケージが必要なのか個別インストールではわからなかったのだ。参考書ではdesktop-full の全部入りを奨めているが、Raspberry Pi 2には荷が重い。そこで、Installing ROS Indigo on Raspberry Piの記事にすがりつき色々試してみたが、ROS-Comm: (recommended) ROS package, build, and communication libraries. No GUI tools. というお任せパッケージしかインストールは成功しない。Desktop: ROS, rqt, rviz, and robot-generic libraries はパッケージが壊れてますみたいなメッセージが出て失敗。しかもむちゃくちゃ時間がかかる。このパッケージからrviz, and robot-generic libraries を取り去ってインストールする方法がわかれば何とかなるハズ。だがワカラン。Raspberry Pi b+でも試したがコンパイル終盤でエラーが発生してDesktopのインストールは失敗。しかも、Raspberry Pi 2でいったんインストール成功したROS-CommのマイクロSDカードが壊れたらしく。翌日起動したら、ワケワカラン画面が出現してこれ以上は無理とかぬかすので、力が抜けた。しかし、カンタンにあきらめるようなことはできない性分なので、今度はUbuntu MATE 15.04にすり寄ってRaspberry Pi 2で試してみた。しかし、撃沈されてしまった。(このUbuntu MATE 15.04は見た目が派手でかっこいいため未練たっぷり。したがって再チャレンジ予定。)
こういう愚かなことを繰り返し、ヤケクソになって今回はRaspberry Pi 2+Xubuntu 上でUbuntu ARM install of ROS Jadeを試すことにした。つまり、新しいカメさんに乗り換えようというわけである。インストール作業はROS-Baseを入れた後、Xubuntuのターミナルエミュレータ上で
sudo apt-get install ros-jade-desktop
を実行。こうしてなんとか参考書の第5章までは動作確認できた。カメさんが2匹いてバックグラウンドが赤(というよりピンクかな指定値どおり200にしたんだけどね)に変わっているのが前回との違いです。
今回は画面撮影ではなく、Raspberry Pi 2+Xubuntu でスクリーンショットしこのブログへアクセスして画像アップロードしました。GIMPのツールがかぶってますが、そこはご笑覧あれ。
ROSではじめるロボットプログラミング―フリーのロボット用「フレームワーク」 (I・O BOOKS)
いかんせん、初心者なのでどのパッケージが必要なのか個別インストールではわからなかったのだ。参考書ではdesktop-full の全部入りを奨めているが、Raspberry Pi 2には荷が重い。そこで、Installing ROS Indigo on Raspberry Piの記事にすがりつき色々試してみたが、ROS-Comm: (recommended) ROS package, build, and communication libraries. No GUI tools. というお任せパッケージしかインストールは成功しない。Desktop: ROS, rqt, rviz, and robot-generic libraries はパッケージが壊れてますみたいなメッセージが出て失敗。しかもむちゃくちゃ時間がかかる。このパッケージからrviz, and robot-generic libraries を取り去ってインストールする方法がわかれば何とかなるハズ。だがワカラン。Raspberry Pi b+でも試したがコンパイル終盤でエラーが発生してDesktopのインストールは失敗。しかも、Raspberry Pi 2でいったんインストール成功したROS-CommのマイクロSDカードが壊れたらしく。翌日起動したら、ワケワカラン画面が出現してこれ以上は無理とかぬかすので、力が抜けた。しかし、カンタンにあきらめるようなことはできない性分なので、今度はUbuntu MATE 15.04にすり寄ってRaspberry Pi 2で試してみた。しかし、撃沈されてしまった。(このUbuntu MATE 15.04は見た目が派手でかっこいいため未練たっぷり。したがって再チャレンジ予定。)
こういう愚かなことを繰り返し、ヤケクソになって今回はRaspberry Pi 2+Xubuntu 上でUbuntu ARM install of ROS Jadeを試すことにした。つまり、新しいカメさんに乗り換えようというわけである。インストール作業はROS-Baseを入れた後、Xubuntuのターミナルエミュレータ上で
sudo apt-get install ros-jade-desktop
を実行。こうしてなんとか参考書の第5章までは動作確認できた。カメさんが2匹いてバックグラウンドが赤(というよりピンクかな指定値どおり200にしたんだけどね)に変わっているのが前回との違いです。
今回は画面撮影ではなく、Raspberry Pi 2+Xubuntu でスクリーンショットしこのブログへアクセスして画像アップロードしました。GIMPのツールがかぶってますが、そこはご笑覧あれ。
カメさん、出てきて [ROS on Raspberry Pi2]
ROS.orgのUbuntu ARM install of ROS Indigoというところを見ながら、Raspberry Pi 2
にROSをインストールしてみた。一番てこずったのは、Ubuntu 14.04 LTSをインストールしたRaspberry Pi 2のキーボードレイアウトの設定だった。トホホ以外のナニモノデモナイ。
とりあえずの結果を下に示しておく。白線がカメさんの足跡だと思っていただきたい。

もちろん、行き当たりばったりでこのような画面が出現するはずはなく、最近出版されたこの本のお世話になったことを付け加えておかねばならない。
Raspberry Pi 2 に[ ros-indigo-desktop-full ] というパッケージをインストールしようとしたらファイルが壊れてますと叱られた。それでもUbuntu ARM install of ROS Indigoのページの必要部分をコピーしてターミナル画面に貼り付けてやるだけでROS Indigoの部分的なインストールはカンタンに済んだ。
Ubuntuのインストールに際しては、
[ Manually resizing the SD card on Raspberry Pi ]
[ 第362回 Raspberry Pi 2でXubuntu 14.04を動かす ]
[ Xubuntuをより快適に利用するためのオススメ設定(基本) ]
などのお世話になった。
にROSをインストールしてみた。一番てこずったのは、Ubuntu 14.04 LTSをインストールしたRaspberry Pi 2のキーボードレイアウトの設定だった。トホホ以外のナニモノデモナイ。
とりあえずの結果を下に示しておく。白線がカメさんの足跡だと思っていただきたい。
もちろん、行き当たりばったりでこのような画面が出現するはずはなく、最近出版されたこの本のお世話になったことを付け加えておかねばならない。
ROSではじめるロボットプログラミング―フリーのロボット用「フレームワーク」 (I・O BOOKS)
- 作者: 小倉 崇
- 出版社/メーカー: 工学社
- 発売日: 2015/06
- メディア: 単行本
Raspberry Pi 2 に[ ros-indigo-desktop-full ] というパッケージをインストールしようとしたらファイルが壊れてますと叱られた。それでもUbuntu ARM install of ROS Indigoのページの必要部分をコピーしてターミナル画面に貼り付けてやるだけでROS Indigoの部分的なインストールはカンタンに済んだ。
Ubuntuのインストールに際しては、
[ Manually resizing the SD card on Raspberry Pi ]
[ 第362回 Raspberry Pi 2でXubuntu 14.04を動かす ]
[ Xubuntuをより快適に利用するためのオススメ設定(基本) ]
などのお世話になった。
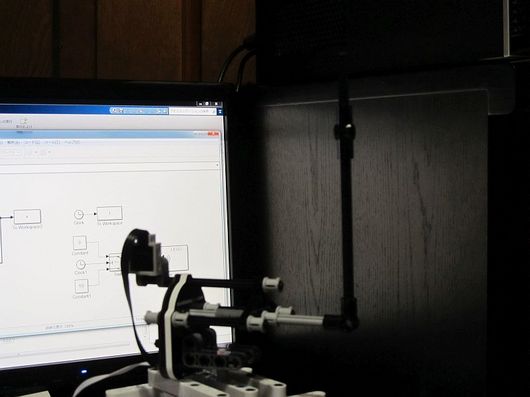
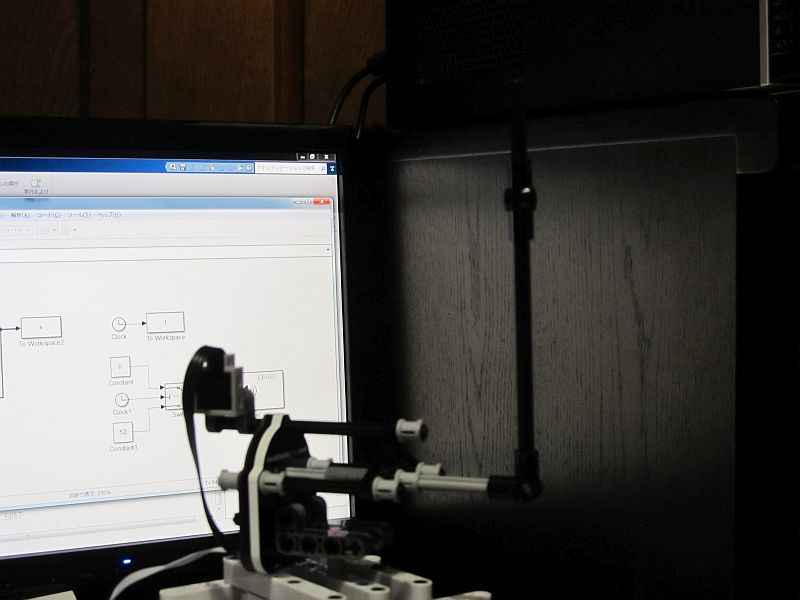
MATLAB Home + LEGO MINDSTORMS NXT で回転型倒立振子実験 [日記]
「MATLAB/Simulinkと実機で学ぶ制御工学」の記載にしたがって回転型倒立振子実験を行おうとしたが、私の所有するLEGO MINDSTORMS NXTのセットでは本に記載されているのとパーツ構成が異なるため、全く同じように装置を構成することはできなかった。2セット目の未開封パーツに手をつけ、さらに回転部の剛性を上げるように勝手に改変を加え実験を行った。エンコーダのケーブルが短いので、暴走するとツライことになるがともかくテストしてみた。結果は1回目暴走。2回目倒立成功。
正直に言えば、こんなヘロヘロのものでうまくいくのだろうか…と思っていたが、なんとあっさり倒立してしまった。
倒立させるための制御理論はほとんどワカラナイままで実験だけとりあえずやってみただけなので、後でじっくり本を読まなければ猿のままだが、とりあえず購入品に特段の問題はないことは確認した。

")
正直に言えば、こんなヘロヘロのものでうまくいくのだろうか…と思っていたが、なんとあっさり倒立してしまった。
倒立させるための制御理論はほとんどワカラナイままで実験だけとりあえずやってみただけなので、後でじっくり本を読まなければ猿のままだが、とりあえず購入品に特段の問題はないことは確認した。

MATLAB Home R2015a の新しいライセンス [日記]
MATLAB Home のTool Box をダウンロードできる場所がわかりにくい(私だけのことかもしれないが)ので、備忘録としてここに記載しておく。
MATLAB Home R2015a の新しいライセンス
"https://jp.mathworks.com/store/link/products/home/new?u=HOME&m=newLicense"
「Arduino と MATLAB で制御系設計をはじめよう!」の「第5章 モータの角度制御実験をしよう}に沿って実験を進めていたら、お約束?の「関数または変数 ’tf' が未定義です。」と突き放された。どうやらこういうことらしい。あー、やっぱりControlSystemToolboxは勝手にインストールされるわけではなかったか…。というのが冒頭の備忘録の発端なので、笑っていただきたい。もういまさら後にひけないので当然のごとく、ControlSystemToolboxをポチるほかなかった。ControlSystemToolboxをインストールして実験再開。こんな装置でもそこそこ制御がかかると面白くてたまらん。実際に試しているのは本の記事とは違うモータードライバ(TA8429H)を使っているので3Aくらいは流せる。しかし、トルクアップして実験する度胸は今のところないので、当分この下の写真のような装置構成で実験を続ける。

昔私がサラリーマンだったころ、先輩や同僚の制御屋さんが装置の調整をしているのを横目に見ながら、なんでこんなムチャするのかと疑問に思っていたが、やっとその疑問を解く糸口を見つけたような気がする。
")
MATLAB Home R2015a の新しいライセンス
"https://jp.mathworks.com/store/link/products/home/new?u=HOME&m=newLicense"
「Arduino と MATLAB で制御系設計をはじめよう!」の「第5章 モータの角度制御実験をしよう}に沿って実験を進めていたら、お約束?の「関数または変数 ’tf' が未定義です。」と突き放された。どうやらこういうことらしい。あー、やっぱりControlSystemToolboxは勝手にインストールされるわけではなかったか…。というのが冒頭の備忘録の発端なので、笑っていただきたい。もういまさら後にひけないので当然のごとく、ControlSystemToolboxをポチるほかなかった。ControlSystemToolboxをインストールして実験再開。こんな装置でもそこそこ制御がかかると面白くてたまらん。実際に試しているのは本の記事とは違うモータードライバ(TA8429H)を使っているので3Aくらいは流せる。しかし、トルクアップして実験する度胸は今のところないので、当分この下の写真のような装置構成で実験を続ける。

昔私がサラリーマンだったころ、先輩や同僚の制御屋さんが装置の調整をしているのを横目に見ながら、なんでこんなムチャするのかと疑問に思っていたが、やっとその疑問を解く糸口を見つけたような気がする。
MATLAB Home は楽しいのだ。 [オススメの「本&おもちゃ」]
高値の華だったMATLABに個人向けのMATLAB Homeというものが提供されているので、以前購入していた本「Physcial Computing Lab シリーズ」を実際に試せるのではないかと思い、MATLAB Homeを先月末に導入してみた。[ Arduino, Raspberry Pi, and LEGO MINDSTORMS projects ]と[ Robotic applications ]も同時に購入(衝動買い)したので、懐はサビシクなったが勢いというものも時に必要である。「Arduino と MATLAB で制御系設計をはじめよう!」をそのまま試すにはR2013bとMATLAB Support for Arduino (aka ArduinoIO Package)をインストールすれば良いようだ。「MATLAB/Simulinkと実機で学ぶ制御工学」の方は最新版のR2015aにSimulink Support Package for LEGO MINDSTORMS NXT Hardwareをインストールすれば試すことができそうだ(最初のサンプルは試せた。)しかし、MINDSTORMSのパーツを追加購入せねばならないので、さらに出費がかさんだ。やはりMINDSTORMSは金食い虫である。
とりあえず、お金のあまりカカラナイArduinoでDCモータの速度制御をするサンプルを試した結果を下に示しておこう。電池がヘタってるので、指令値に追従できていないようだ。実験装置の写真で速度指令用のポテンショメータが見切れてしまった。久しぶりのブログ更新でイマイチな撮影。注意散漫だなあ。


")
")
とりあえず、お金のあまりカカラナイArduinoでDCモータの速度制御をするサンプルを試した結果を下に示しておこう。電池がヘタってるので、指令値に追従できていないようだ。実験装置の写真で速度指令用のポテンショメータが見切れてしまった。久しぶりのブログ更新でイマイチな撮影。注意散漫だなあ。


ArduinoとMATLABで制御系設計をはじめよう! (Physical Computing Lab)
- 作者: 平田光男
- 出版社/メーカー: TechShare
- 発売日: 2012/12/07
- メディア: 単行本(ソフトカバー)
MATLAB/Simulinkと実機で学ぶ制御工学-PID制御から現代制御まで- (Physical Computing Lab)
- 作者: 川田 昌克
- 出版社/メーカー: TechShare
- 発売日: 2013/11/30
- メディア: 単行本(ソフトカバー)
陽のあたる場所 [写真集-散歩道]
ライブカメラに船が写っていたので、久しぶりに港を散歩。
ついでにユニクロまで出向き買い物を済ませた。
天気が良いと誰しも同じような気持ちになるらしく、カメラ片手に散歩のひとたちを散見した。

ついでにユニクロまで出向き買い物を済ませた。
天気が良いと誰しも同じような気持ちになるらしく、カメラ片手に散歩のひとたちを散見した。

Kindle for PC [オススメの「本&おもちゃ」]
Kindle for PCで和書が読めるようになったので、早速ダウンロードして試読してみました。
最初に購入したのは、
マルチコプターを作ろう: MultiWiiを使用したクアッドコプターの製作 [Kindle版]
老眼鏡なしで読書できるのはありがたい。

最初に購入したのは、
マルチコプターを作ろう: MultiWiiを使用したクアッドコプターの製作 [Kindle版]
老眼鏡なしで読書できるのはありがたい。
マルチコプターを作ろう: MultiWiiを使用したクアッドコプターの製作
- 出版社/メーカー:
- 発売日: 2014/01/24
- メディア: Kindle版
面白い記事は見つかったでしょうか?下のバナーをクリックして応援してくださった方々、ありがとうございます。
Link














カワズの池

買わず 飛び込む 水の音?



