ブログランキングに参加しています。
おだててみると、ナニカオモシロイことが起きるかも知れません。
モチロン保証はいたしませんが。
写真はダウンロード可能です。お気に召した写真があれば、ご自由にお使い下さい。
ただし、写真も著作権の放棄はしておりません。
Raspberry Pi 2+Xubuntu で#rosbook_jpをたどる。 [ROS on Raspberry Pi2]
タイトルが、おかしいのはちょっとした実験なのでお許しいただきたい。
先に行った、Raspberry Pi 2+Xubuntu でROS Jadeを試す作業を再開することにした。ubuntu MATE にROS desktopをインストールできていないためである。地味な環境では初心者はやる気がでないもんね。
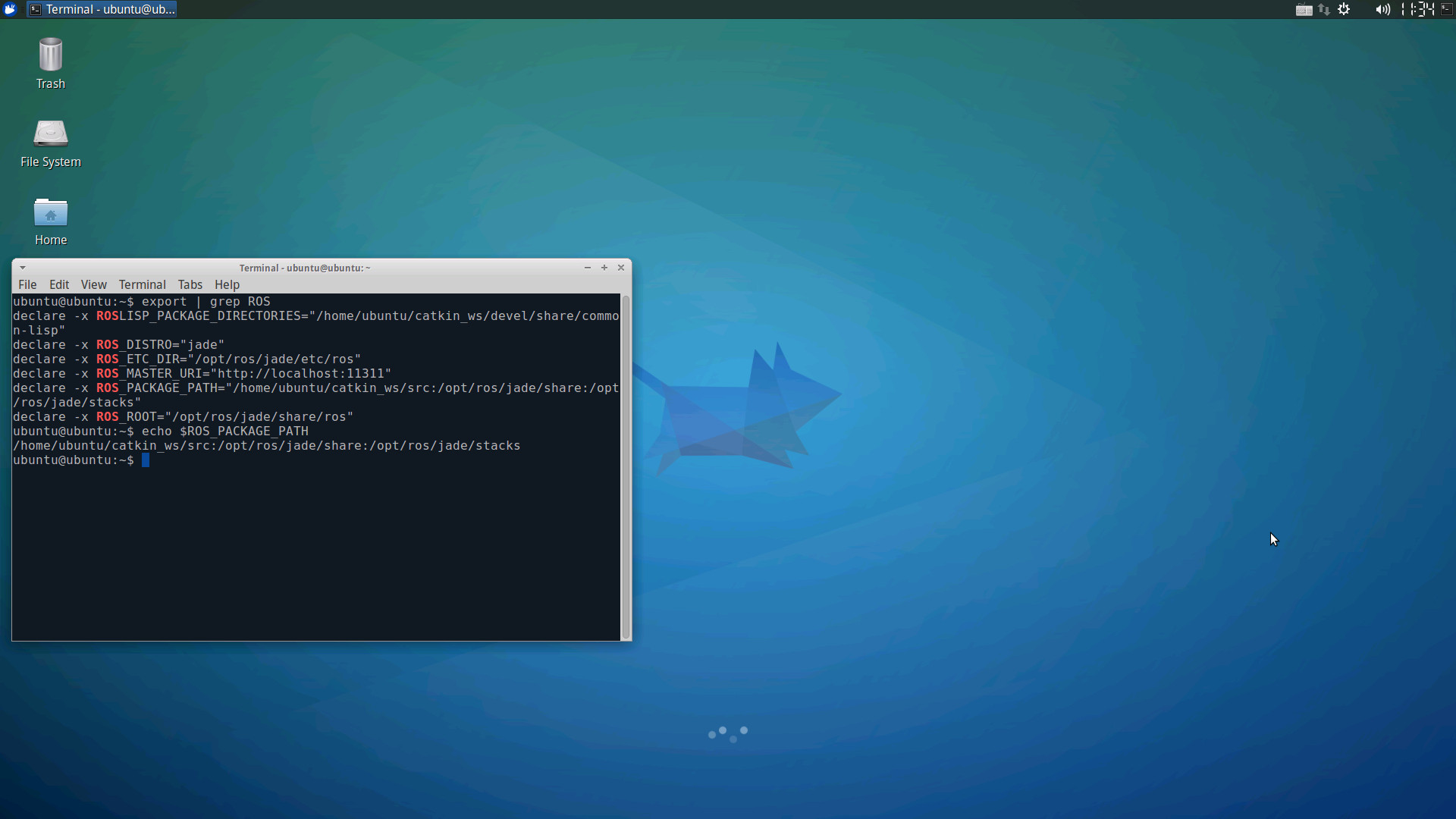
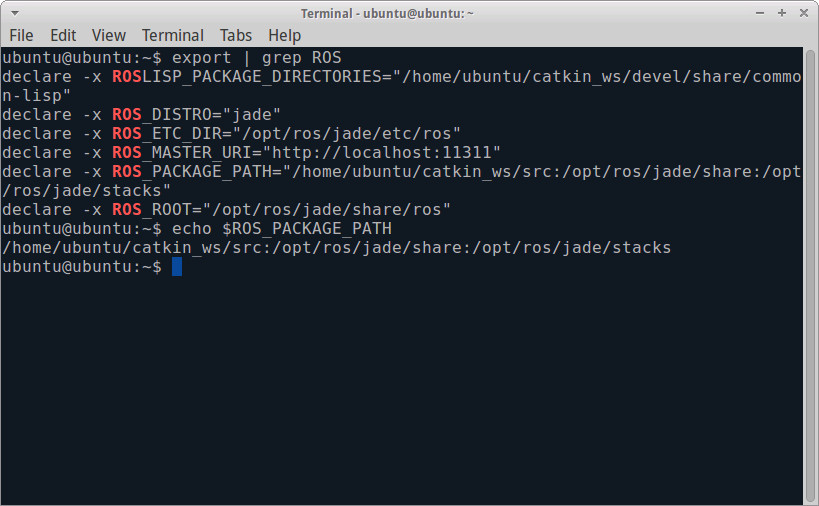
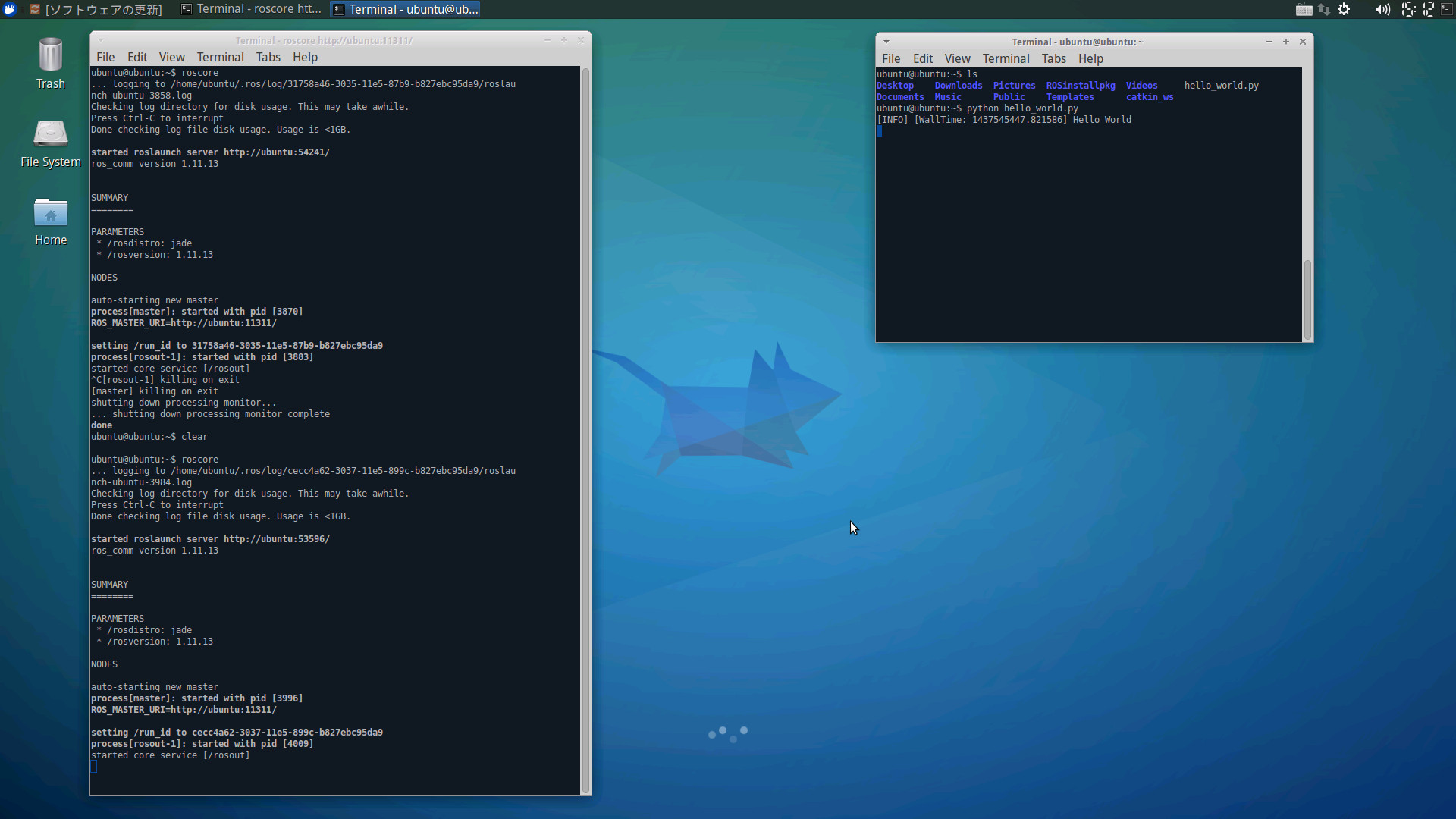
さて、前回同様に、まずは環境変数の確認だ。結果画面は下の通り。画像重複はXubuntuの素朴なデスクトップをご覧いただきたかったからである。

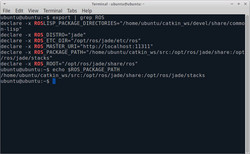
とりあえず、問題なさそうだ。
つぎは、参考書の
第6章「ROS」で「Hello World」
を試す。
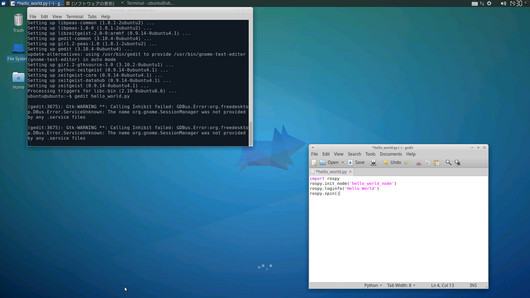
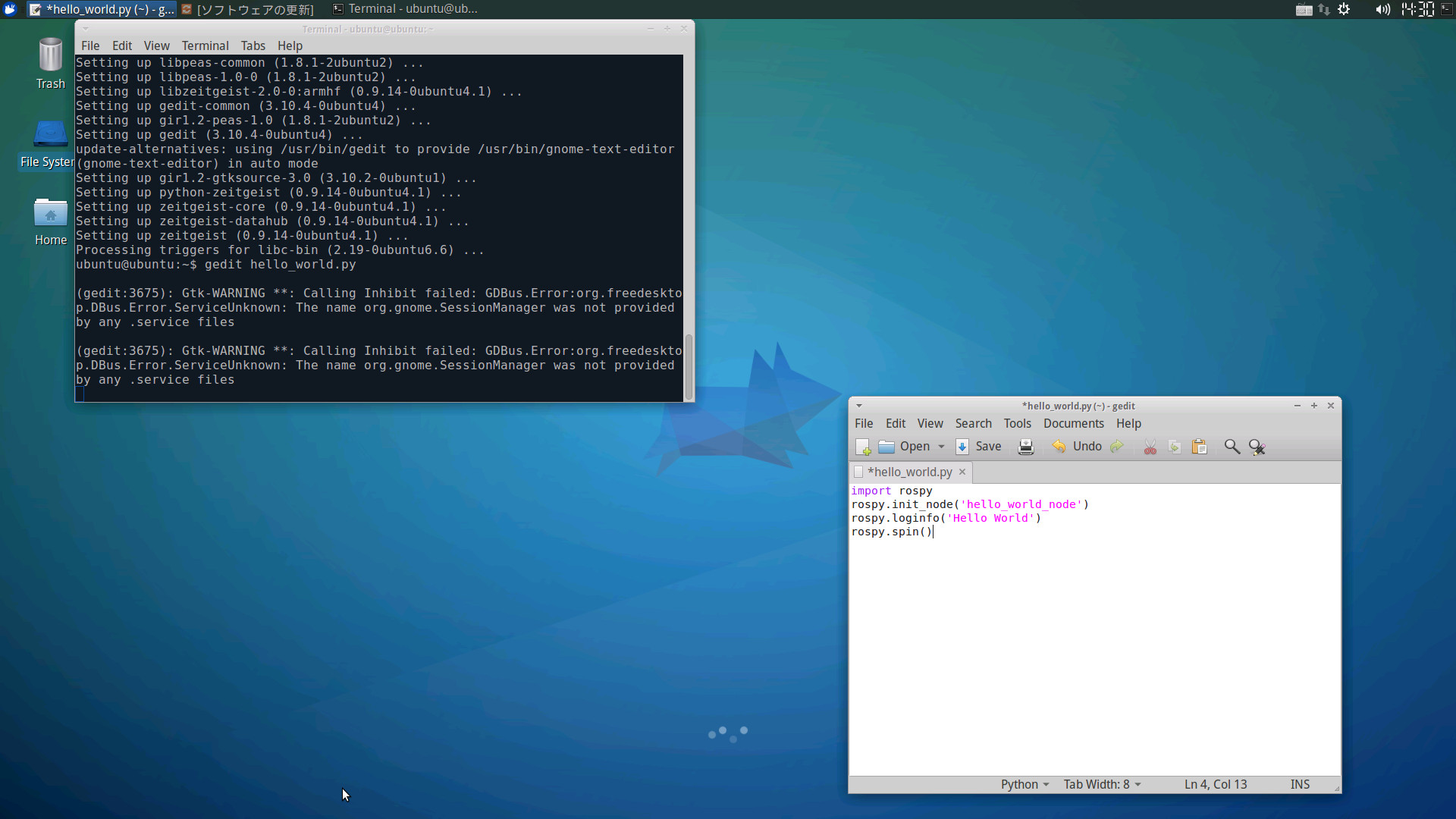
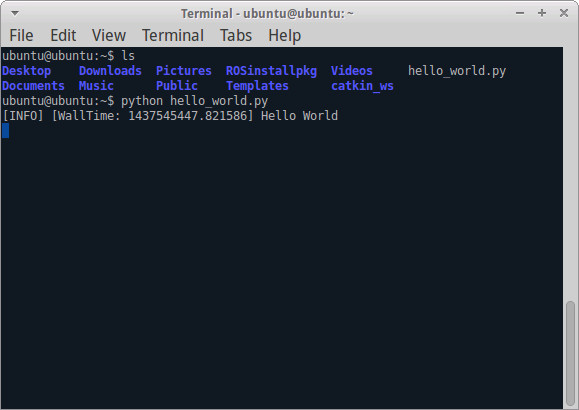
geditのインストールからはじめたが、このエディタで作ったファイルをhome直下に置くで素人の浅はかさが露呈した。/home/ubuntu に置けば良いのだった。れーせーに考えれば、エディタで作った「hello_world.py」ファイルの置いてあるディレクトリを指定して、
$ python hello_world.py
するといいわけだ。とは言え、一応確認してみたらおkだった。なんてところが初心者のツライところ。
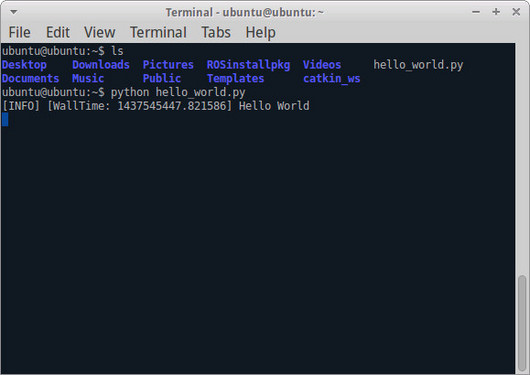
それぞれの拡大画像は下の通り。
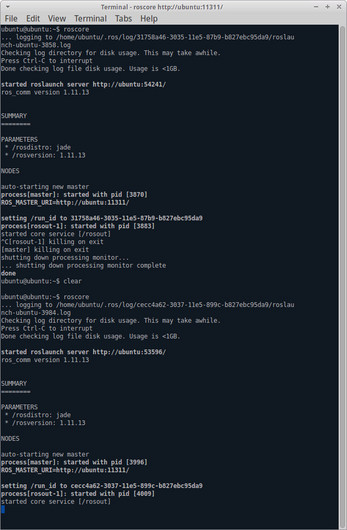
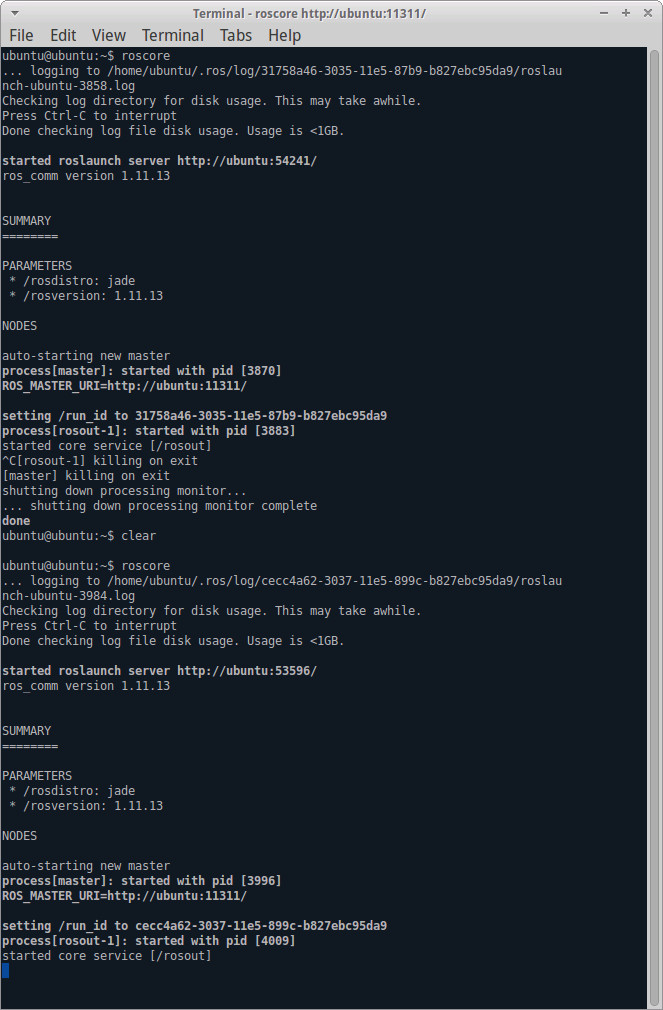
roscore起動
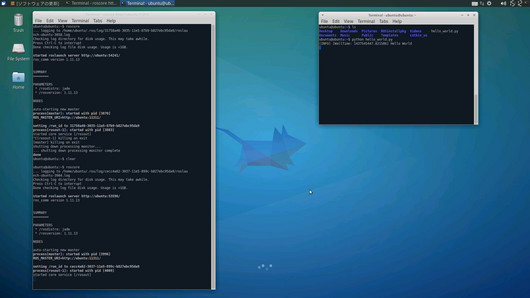
別のターミナルで「Hello World」の表示を確認。
これで、参考書↓の第一部終了。
")



先に行った、Raspberry Pi 2+Xubuntu でROS Jadeを試す作業を再開することにした。ubuntu MATE にROS desktopをインストールできていないためである。地味な環境では初心者はやる気がでないもんね。
さて、前回同様に、まずは環境変数の確認だ。結果画面は下の通り。画像重複はXubuntuの素朴なデスクトップをご覧いただきたかったからである。
とりあえず、問題なさそうだ。
つぎは、参考書の
第6章「ROS」で「Hello World」
を試す。
geditのインストールからはじめたが、このエディタで作ったファイルをhome直下に置くで素人の浅はかさが露呈した。
$ python hello_world.py
するといいわけだ。とは言え、一応確認してみたらおkだった。なんてところが初心者のツライところ。
それぞれの拡大画像は下の通り。
roscore起動
別のターミナルで「Hello World」の表示を確認。
これで、参考書↓の第一部終了。
2015-07-22 16:23
nice!(0)
コメント(0)
面白い記事は見つかったでしょうか?下のバナーをクリックして応援してくださった方々、ありがとうございます。
Link














カワズの池

買わず 飛び込む 水の音?




コメント 0