ブログランキングに参加しています。
おだててみると、ナニカオモシロイことが起きるかも知れません。
モチロン保証はいたしませんが。
写真はダウンロード可能です。お気に召した写真があれば、ご自由にお使い下さい。
ただし、写真も著作権の放棄はしておりません。
ODEのサンプルプログラムに遊ばれる‐その1 [ODEの下僕となる]
QED(Opwn Dynamics Engine) をインストールしてしまったので、しばらく下僕の生活が続くのは目に見えている。なにはともあれ、動機付けは大切である。まず、「demura.net: ロボットの開発と教育」のダウンロードページからrobosimu120409.zipをダウンロードし、見た目の楽しそうなデモはないかと一通り眺めることにした。ダウンロードしたrobosimu120409.zipを解凍しコマンドプロンプトでおまじないしたら、特段の問題もなくプログラムは動作しているように見えた。とりあえず、解説本は所持している(探すのに1時間かかったけど)のでほかに情報はないかとネットをさまよい、いくつかのサイトを見つけた。そのうちのひとつnatural scienceというサイトにODE (Open Dynamic Engine) 入門という記事があった。9日目までの入門コースのようなので、てっとりばやくODEがどんなものなのか眺めるにはちょうどいいような気がした(上から目線だけどいいのか…)ので、さっそく一日目のソースをコピー&ペーストしたら、83行目のパスを書き換えただけでODE-0.13でも動いてしまった。
理屈の部分は明日ゆっくり読むことにして、今日はもう寝る。




理屈の部分は明日ゆっくり読むことにして、今日はもう寝る。
簡単!実践!ロボットシミュレーション - Open Dynamics Engineによるロボットプログラミング
- 作者: 出村 公成
- 出版社/メーカー: 森北出版
- 発売日: 2007/05/18
- メディア: 単行本(ソフトカバー)
ODEのサンプルプログラムに遊ばれる‐その2 [ODEの下僕となる]
ODE-0.13に含まれるdemo フォlルダー内のプログラムを実行しようとして、泥沼に陥っていた。
れーせーに考えれば、「自作プログラムのビルド法/ demra.net:ロボットの開発と教育」の手順でとんでもない勘違いをしでかしていたのだった。「自作ODEプログラムのビルド法/demra.net:ロボットの開発と教育」に示された方法には、わざわざ強調して下のように表示してあった。
「なお,この方法は相対パスを使っているため自分で作成したファイルの置く場所を変更できません.必ず,c:\ode-0.12\myprogの中に好きな名前フォルダ(英文字半角)を作り,その中にテンプレートとなるプロジェクトファイルtemplate.cbpと自分で作成したソースファイルを置いてください.」
これを忘れてしまい、やっかいなことになってしまったのだった。ODE-0.13に含まれるdemo フォlルダー内のプログラムを実行しようとして、プロジェクトにヘッダーファイルを追加するときdemo フォlルダー内のヘッダーファイルを指定しまうミスを犯したのになかなか気がつかなかった。<>と" "の違いに気づけよなあ…コード変更なしで
demoを実行させるには、templateフォルダーにdemo フォlルダー内のヘッダーファイルのコピーを入れておかねばならなかったのか…Orz
さて、ほかのサンプルプログラムはどんな具合だろうかと、いろいろやってみた。
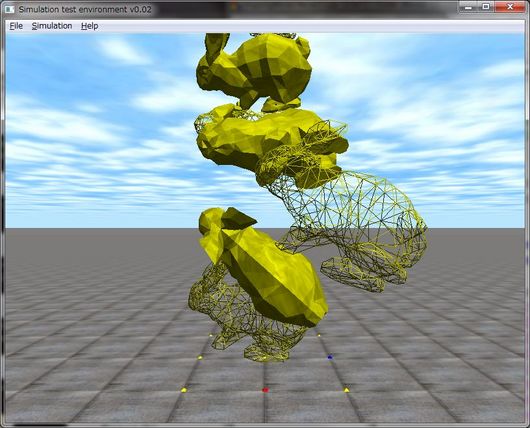
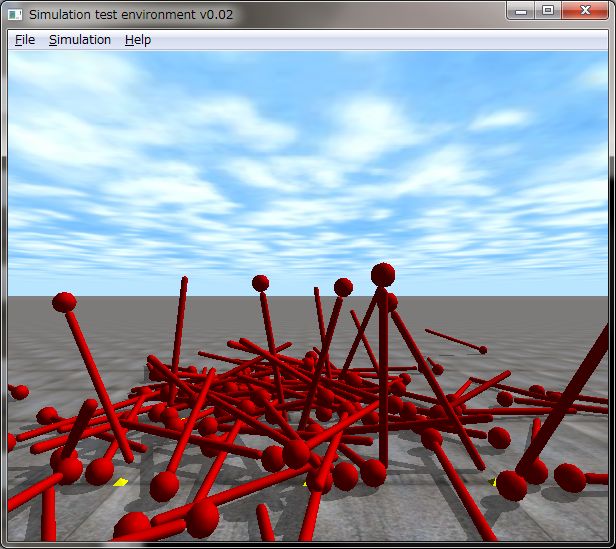
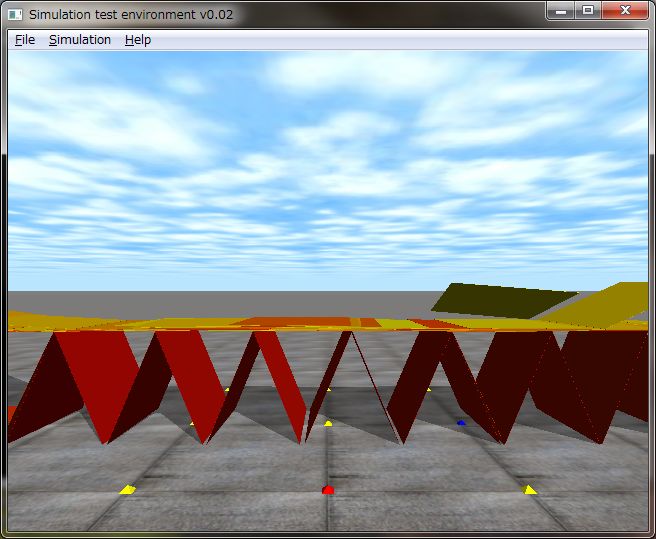
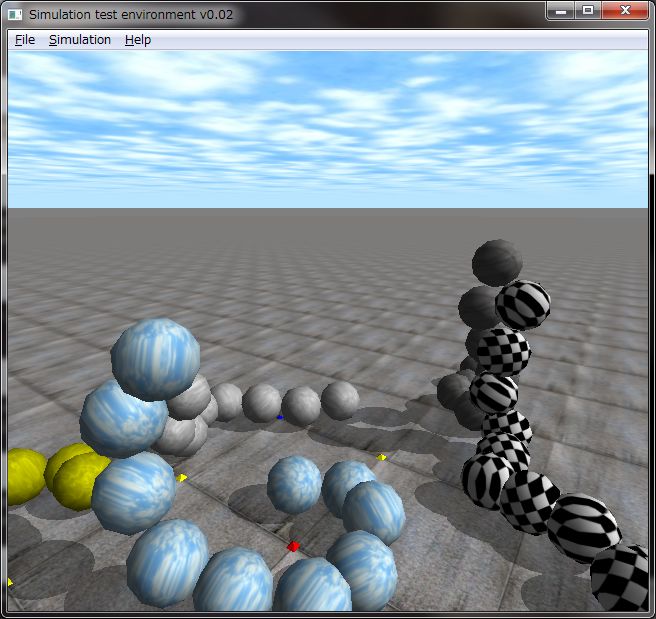
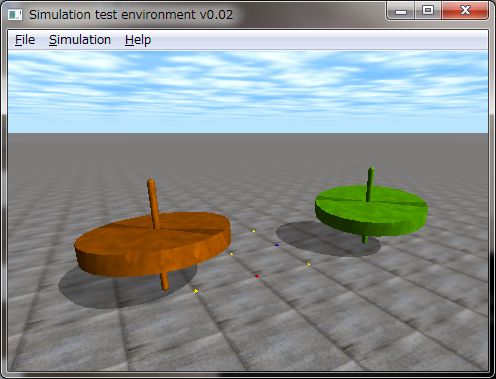
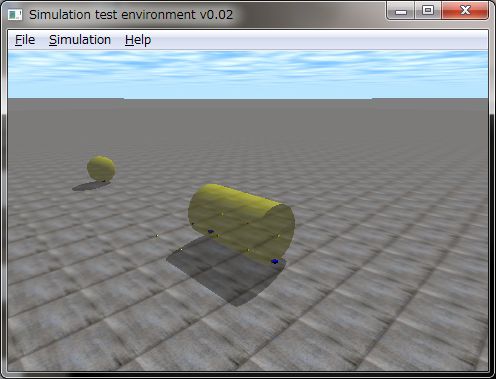
natural scienceさんのODE (Open Dynamic Engine) 入門にある2日目から8日目までのサンプルプログラムが試せるようになった。9日目のプログラムは今のところサッパリワカラナイ。なにしろ、しろーと丸出し状態なので、ヘッダーファイルをどこに置けばよいのか「ODEでSTLフォーマット(3D)の物体を作る方法について/bambooflow Note」を参考にしてねと言われても手の出しようがない。
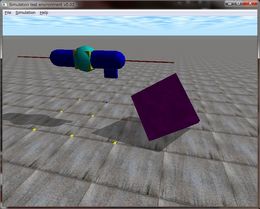
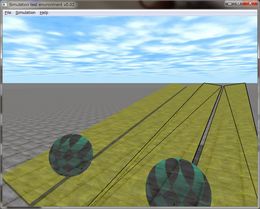
とりあえず、ビルドして実行できた証拠写真を掲載しておこう。←静止画なのでインパクトないけど
れーせーに考えれば、「自作プログラムのビルド法/ demra.net:ロボットの開発と教育」の手順でとんでもない勘違いをしでかしていたのだった。「自作ODEプログラムのビルド法/demra.net:ロボットの開発と教育」に示された方法には、わざわざ強調して下のように表示してあった。
「なお,この方法は相対パスを使っているため自分で作成したファイルの置く場所を変更できません.必ず,c:\ode-0.12\myprogの中に好きな名前フォルダ(英文字半角)を作り,その中にテンプレートとなるプロジェクトファイルtemplate.cbpと自分で作成したソースファイルを置いてください.」
これを忘れてしまい、やっかいなことになってしまったのだった。ODE-0.13に含まれるdemo フォlルダー内のプログラムを実行しようとして、プロジェクトにヘッダーファイルを追加するときdemo フォlルダー内のヘッダーファイルを指定しまうミスを犯したのになかなか気がつかなかった。<>と" "の違いに気づけよなあ…コード変更なしで
demoを実行させるには、templateフォルダーにdemo フォlルダー内のヘッダーファイルのコピーを入れておかねばならなかったのか…Orz
さて、ほかのサンプルプログラムはどんな具合だろうかと、いろいろやってみた。
natural scienceさんのODE (Open Dynamic Engine) 入門にある2日目から8日目までのサンプルプログラムが試せるようになった。9日目のプログラムは今のところサッパリワカラナイ。なにしろ、しろーと丸出し状態なので、ヘッダーファイルをどこに置けばよいのか「ODEでSTLフォーマット(3D)の物体を作る方法について/bambooflow Note」を参考にしてねと言われても手の出しようがない。
とりあえず、ビルドして実行できた証拠写真を掲載しておこう。←静止画なのでインパクトないけど
ODEのサンプルプログラムに遊ばれる‐その3 [ODEの下僕となる]
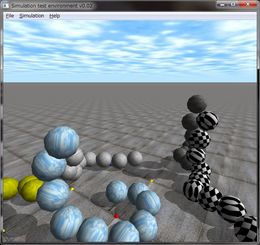
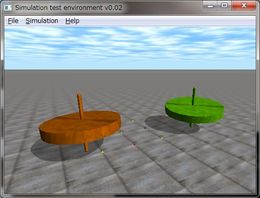
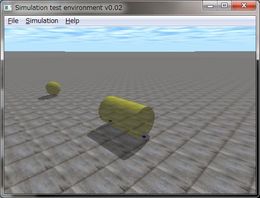
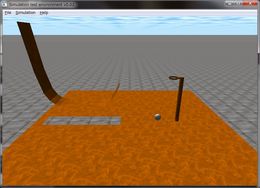
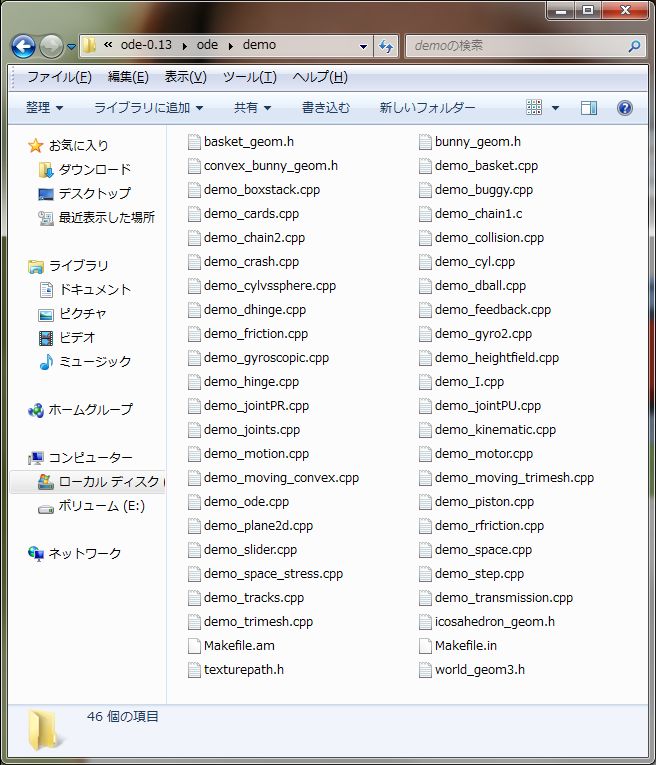
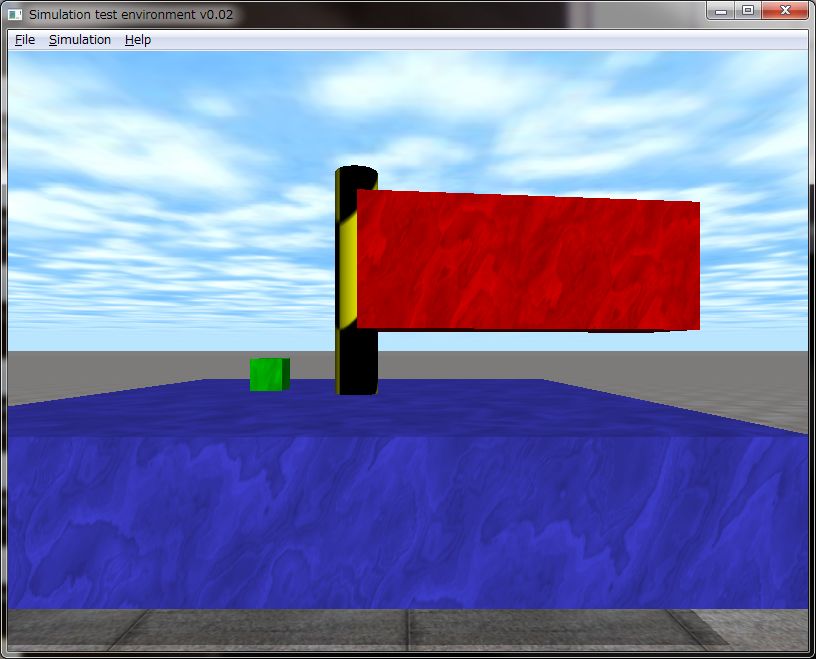
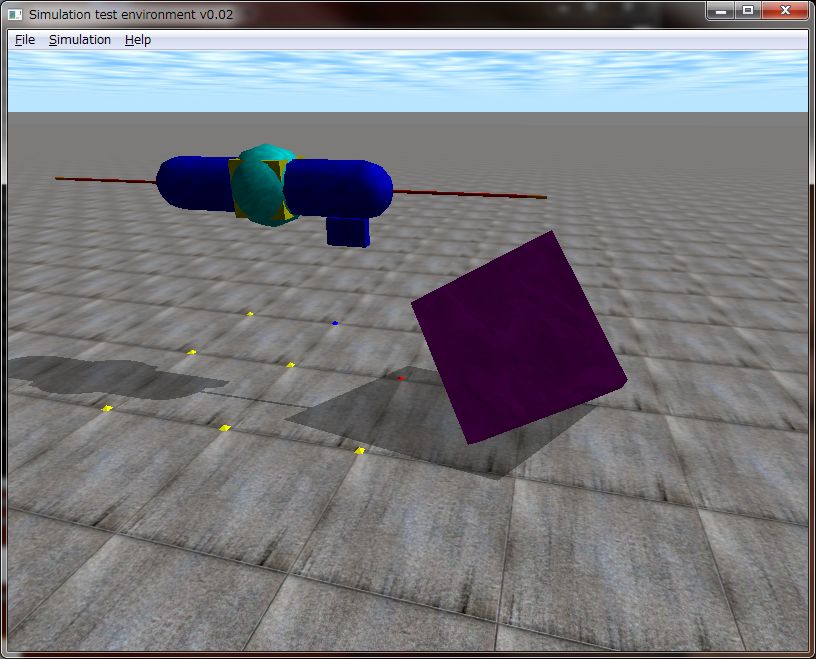
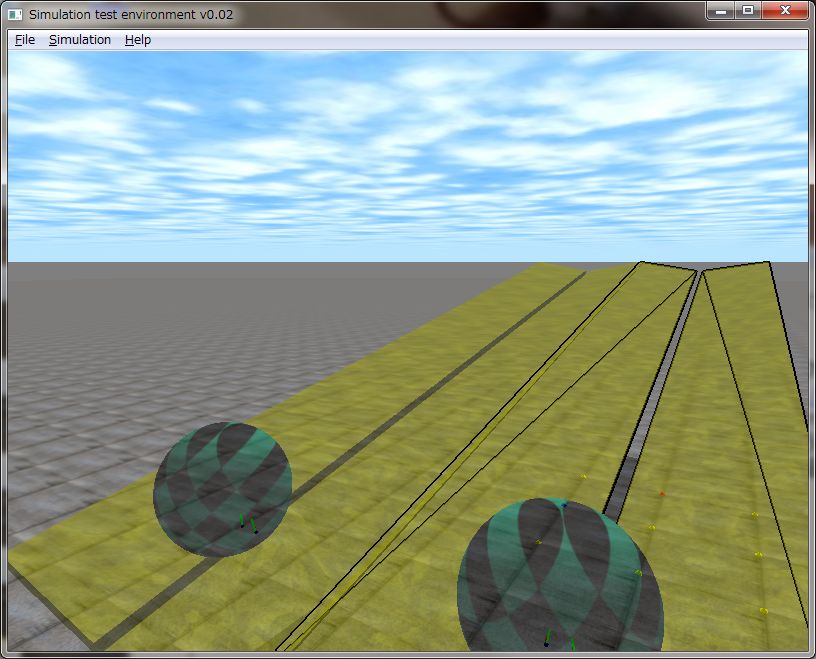
ODE-0.13をインストール後フォルダを覗くと、ode>demoフォルダ内に30数個のdemo_***.cppファイルが入っていることに気がつく。下図参照。
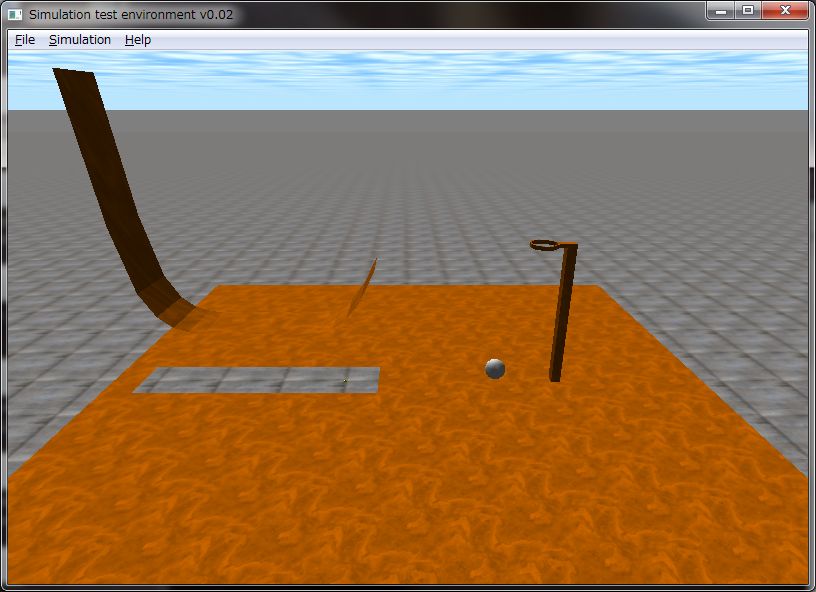
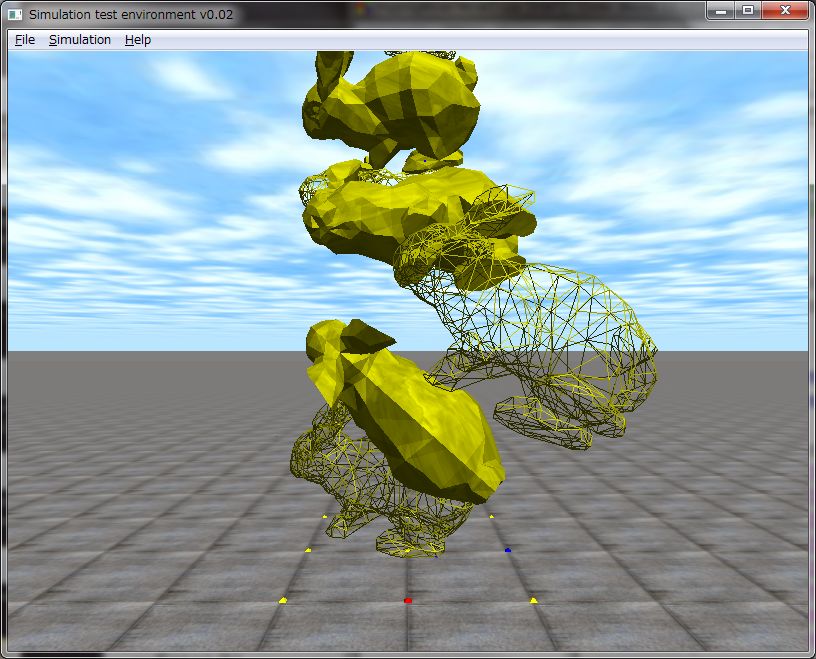
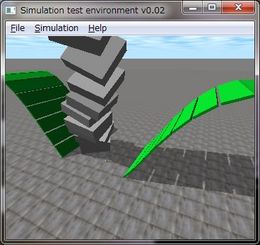
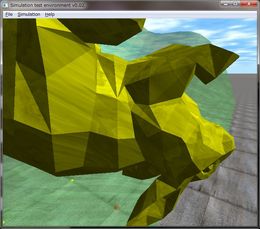
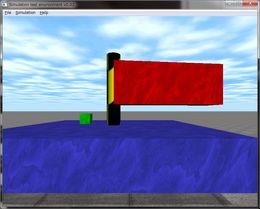
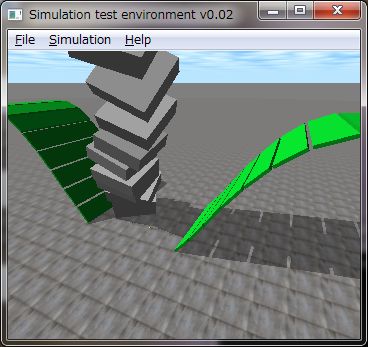
このうちいくつかは、、「demura.net: ロボットの開発と教育」内のダウンロードページにあるODE0.12用のrobosimu120409.zipというファイルに含まれるrobosimu120409>src>***.cppファイルと同様に試してみることができる(うまくいかなかったものもあったが)。いくつか実行画面の静止画を作業した証拠(<何か意味があるのか)として下に貼り付けてみた。
すでにサルになりきっているため、どこか他にもサンプルプログラムが落ちていないものかとネットをフラフラしたら、「ODEで3次元ロボットシミュレーション」というページが見つかった。「Open Dynamics Engine 」両方とも著者は同じで松下 光次郎さん。 (いずれこれらのページのお世話になることがあるかもしれません。念のため備忘録としておきます。)
これだけサンプルが集まれば、後はなんとかなるような気もするが…どうにも肝心なことを忘れているような気がしてしかたがない。それにMakefile.am とかMakefile.in ってファイルはいったい何。
このうちいくつかは、、「demura.net: ロボットの開発と教育」内のダウンロードページにあるODE0.12用のrobosimu120409.zipというファイルに含まれるrobosimu120409>src>***.cppファイルと同様に試してみることができる(うまくいかなかったものもあったが)。いくつか実行画面の静止画を作業した証拠(<何か意味があるのか)として下に貼り付けてみた。

すでにサルになりきっているため、どこか他にもサンプルプログラムが落ちていないものかとネットをフラフラしたら、「ODEで3次元ロボットシミュレーション」というページが見つかった。「Open Dynamics Engine 」両方とも著者は同じで松下 光次郎さん。 (いずれこれらのページのお世話になることがあるかもしれません。念のため備忘録としておきます。)
これだけサンプルが集まれば、後はなんとかなるような気もするが…どうにも肝心なことを忘れているような気がしてしかたがない。それにMakefile.am とかMakefile.in ってファイルはいったい何。
忘れ物はこれなのか [ODEの下僕となる]
前回のエントリで、どうにも肝心なことを忘れているような気がしてしかたがない。と言ったのは、サンプルプログラムを試す際に漠然と感じている居心地の悪さのことなのだ。サルになりきっているはずが、ココロのどこかで、Code::Blocksのメニューから「ビルドして実行」を選択するだけでソースコードからCPUの理解できる機械語のプログラムができてしまう…このとき何をどうしてるんだろ。といった疑問がココロの片隅に巣くっているので居心地が悪いと感じるのだろう。こういう疑問を持たずに効率良くプログラム開発ができるように総合環境はできていると考えられるので、こうした疑問を持つこと自体、私がプログラム開発のど素人である証である。
さりとて、ワダカマリを放置したままではいられず、ネットをふらふら彷徨っているうち、PowerNews連載コラムというのに遭遇した。このコラムの第三回 ソースの入力から完成までを目にしたことで、私のココロの居心地の悪さは幾分軽減されたようである。要するに、私は用語の整理がついていなかったということか…なにしろサルだからなあ。ワークスペースとプロジェクトもきちんとは理解できてないなあ。現状の問題点はCode::Blocks についてなにもわかっていないことだ、と今頃気がつく。(先輩教えて!プログラミングのabc(第1回)---コンパイルとビルドって何が違うのというページを今こっそり、ながめている)泥縄だなあ、いつもながら。ODEとは直接関係のない話が続くような気もする午前零時50分。
さりとて、ワダカマリを放置したままではいられず、ネットをふらふら彷徨っているうち、PowerNews連載コラムというのに遭遇した。このコラムの第三回 ソースの入力から完成までを目にしたことで、私のココロの居心地の悪さは幾分軽減されたようである。要するに、私は用語の整理がついていなかったということか…なにしろサルだからなあ。ワークスペースとプロジェクトもきちんとは理解できてないなあ。現状の問題点はCode::Blocks についてなにもわかっていないことだ、と今頃気がつく。(先輩教えて!プログラミングのabc(第1回)---コンパイルとビルドって何が違うのというページを今こっそり、ながめている)泥縄だなあ、いつもながら。ODEとは直接関係のない話が続くような気もする午前零時50分。
CodeBlocks for Arduino & AVR [ODEの下僕となる]
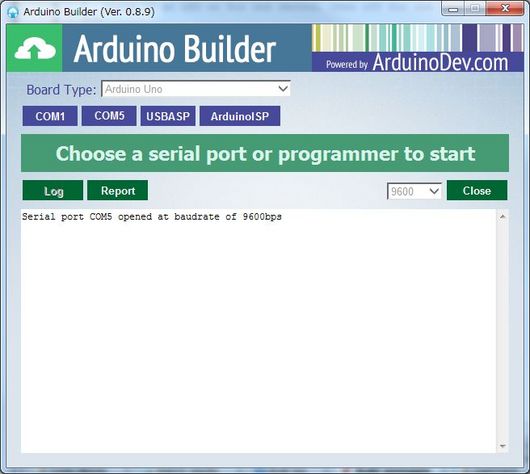
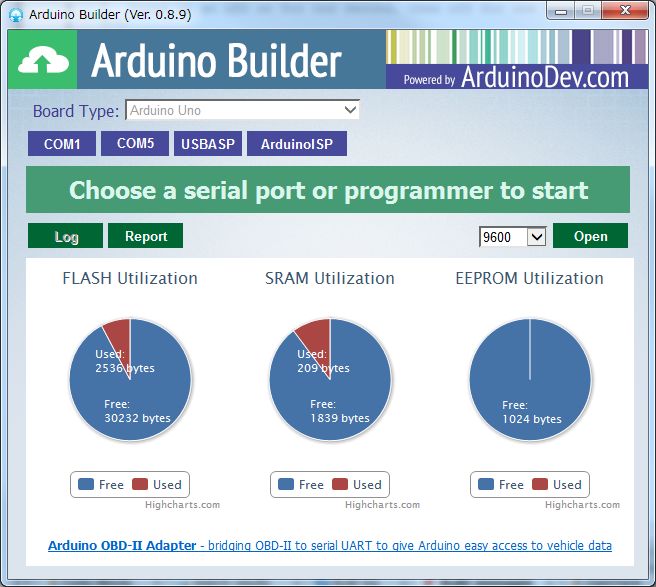
Code::Blocksに慣れるという目的で、A customized distribution of Code::Blocks for Arduino and AVR というのをCodeBlocks for Arduino & AVRからダウンロードし、試してみた。
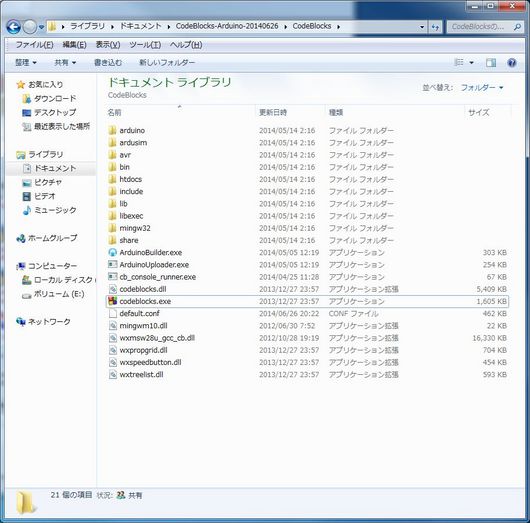
特にインストール作業が必要なわけでもなく、CodeBlocks-Arduino-20140626.7zファイルを展開したフォルダ内のcodeblocks.exeをダブルクリックすれば、通常の初期画面(既に日本語化してあるCode::Blocksとは違う英語版)が現れる。
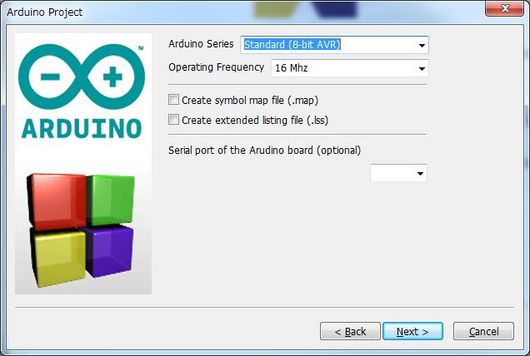
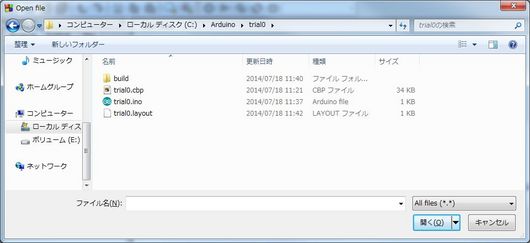
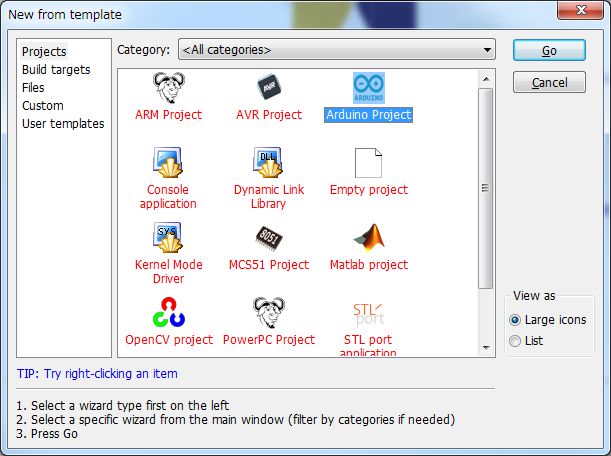
メニューからFile>New>Project と進むと下の画面が現れる。
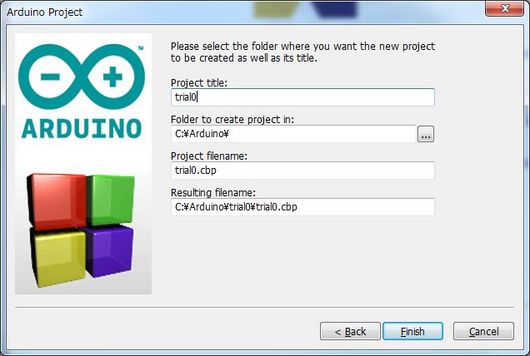
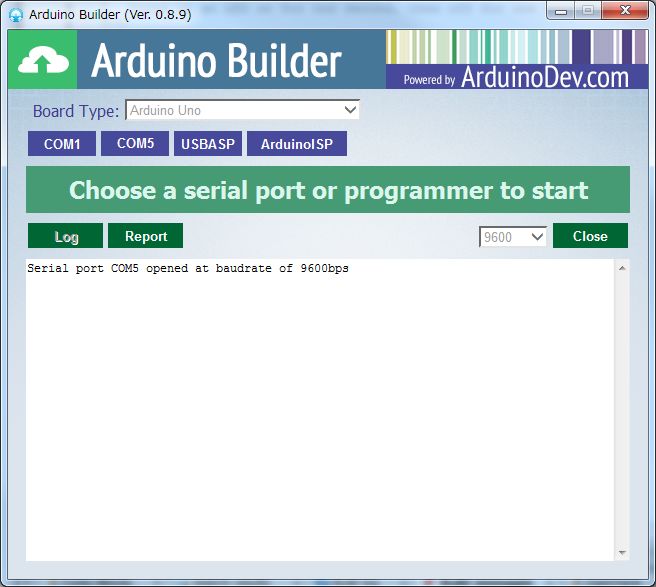
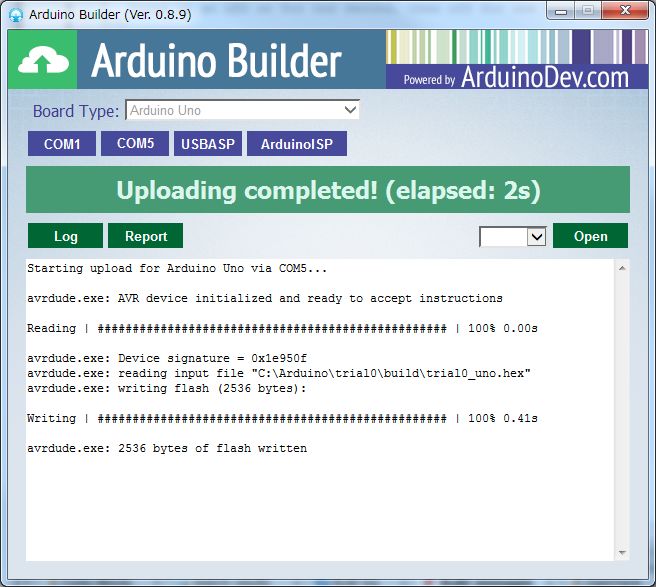
Arduino Projectを選んでGo をクリックすれば、後は一本道。プロジェクト名を決めてNext をクリックするだけ。
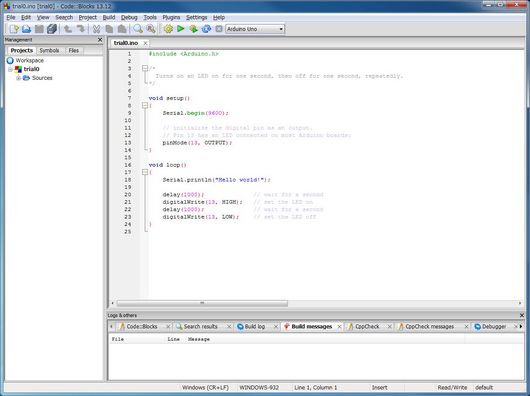
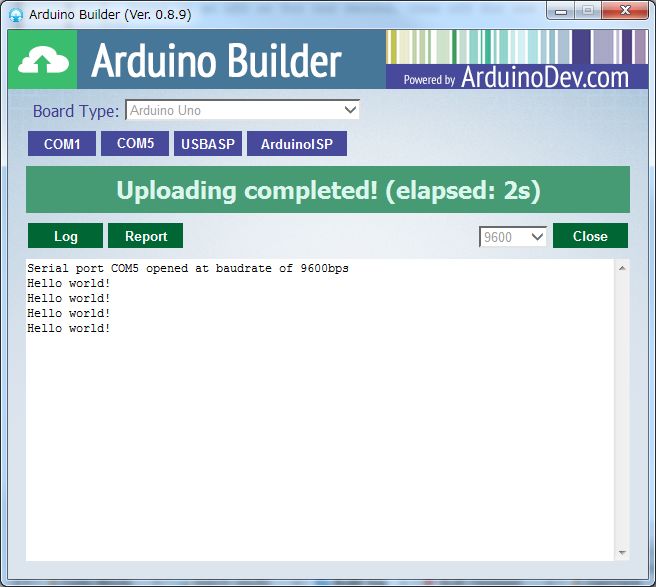
見慣れたコードが現れるので、メニューのBuild and run をクリックすると、
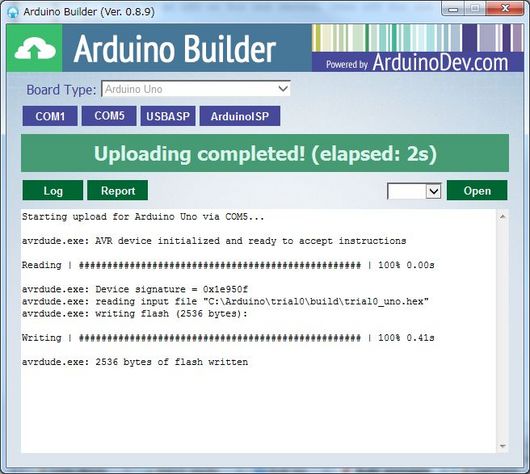
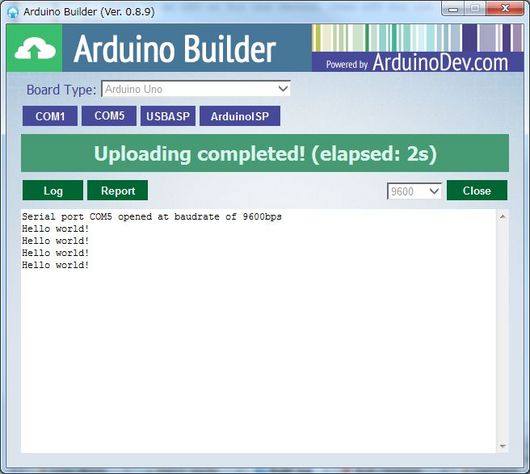
という具合に無事に動作確認(Ledが光るだけなので、画像は省略した)できた。
実行ファイルもできている。***.cbpファイルをダブルクリックすれば、Code;;Blocks が起動して再確認可能。
なんだかあっけない、と言えばあっけない。
特にインストール作業が必要なわけでもなく、CodeBlocks-Arduino-20140626.7zファイルを展開したフォルダ内のcodeblocks.exeをダブルクリックすれば、通常の初期画面(既に日本語化してあるCode::Blocksとは違う英語版)が現れる。
メニューからFile>New>Project と進むと下の画面が現れる。
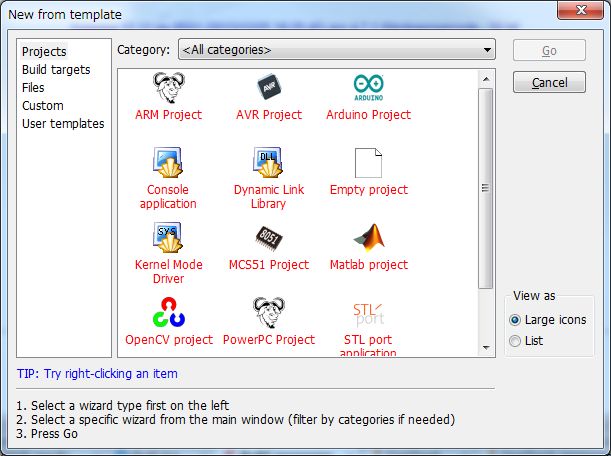
Arduino Projectを選んでGo をクリックすれば、後は一本道。プロジェクト名を決めてNext をクリックするだけ。
見慣れたコードが現れるので、メニューのBuild and run をクリックすると、
という具合に無事に動作確認(Ledが光るだけなので、画像は省略した)できた。
実行ファイルもできている。***.cbpファイルをダブルクリックすれば、Code;;Blocks が起動して再確認可能。
なんだかあっけない、と言えばあっけない。
Bullet Physics Library [ODEの下僕となる]
Code::Blocksに慣れるという目的で(<またですかぁ)、Bullet Physics Libraryをインストールしてみた。実は、パソコンデスクの下にこの本「Bullet Physicsではじめよう3Dモーションシミュレーション」を積んであったのを思い出し(3年間ホッタラカシ)、この本をガイドにBullet Physics Libraryのインストール作業を行った。

Bullet Physics LibraryをCode::Blocksでビルドするにはプロジェクトファイルが必要で、そのプロジェクトファイルを生成するためにCMakeを使ってね、ということで、CMake(cmake-3.0.0-win32-x86.exe)をダウンロードしてインストール(exeファイルをダブルクリックするだけ、後はデフォルトのままnextをクリック)した。
bullet-2.82-r2704.zipをダウンロードして、展開したらCMakeを使ってプロジェクトファイルを生成する作業だが、毎度ながら、本の通りにはならずCmakeの画面は朱に染まった。それでも、Generateボタンが有効になったので、厚かましくクリック。警告は出たがエラーはゼロ。これで何とかなるかもしれんとほくそ笑む。へへっ…BULLET_PHYSICS.cbpが出来てるのをフォルダを覗いて確認。
このBULLET_PHYSICS.cbpをダブルクリックすれば、Code::Blocks(メニュー項目の日本語化作業済み)が起動する。そこでビルドターゲットを[all]にし、ビルドをクリック。10分足らずでビルド完了。0エラー6警告だった。
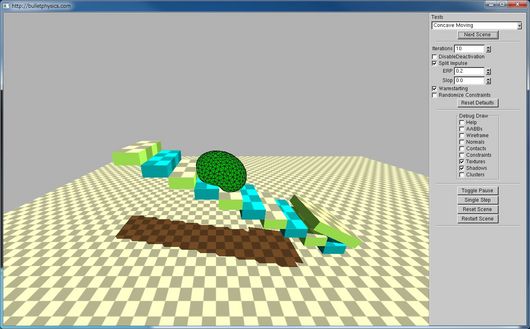
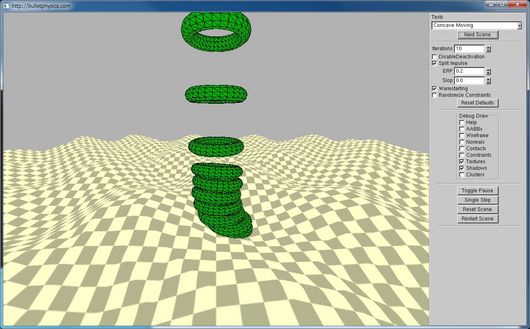
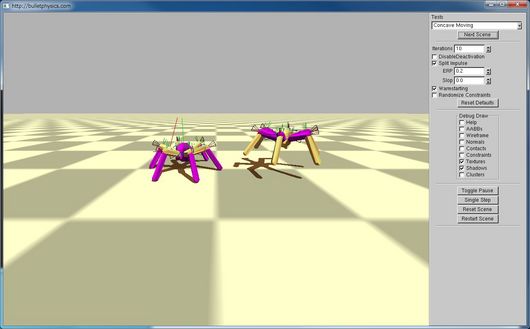
この後、BULLET_PHYSICS環境を整える作業を行ってビルドターゲットを[install]にセットしビルドしてねと本に書いてあったので、やってみたら、BULLET_PHYSICSフォルダの中にぽつんとlibフォルダがあった。あれヘッダーが生成されるって書いてあったけど、ないぞ…どこかでなにかを間違ったのか。サルに徹して本に書いてある通りに作業するつもりだったが、OpenGL環境の設定として示されている7つのヘッダファイルのコピー作業は同名の新しい日付のものが既にコピー先に存在したので旧いファイルはコピーしていない…そのせいか。いやあ…ちゃんとデモプログラムは出来てるし…サンプルプログラムを作ってみないと、間違ったかどうかワカラン。
デモプログラムは、こんな感じ。
Bullet Physicsではじめよう3Dモーションシミュレーション
- 作者: 橋本 洋志
- 出版社/メーカー: オーム社
- 発売日: 2011/05
- メディア: 単行本
Bullet Physics LibraryをCode::Blocksでビルドするにはプロジェクトファイルが必要で、そのプロジェクトファイルを生成するためにCMakeを使ってね、ということで、CMake(cmake-3.0.0-win32-x86.exe)をダウンロードしてインストール(exeファイルをダブルクリックするだけ、後はデフォルトのままnextをクリック)した。
bullet-2.82-r2704.zipをダウンロードして、展開したらCMakeを使ってプロジェクトファイルを生成する作業だが、毎度ながら、本の通りにはならずCmakeの画面は朱に染まった。それでも、Generateボタンが有効になったので、厚かましくクリック。警告は出たがエラーはゼロ。これで何とかなるかもしれんとほくそ笑む。へへっ…BULLET_PHYSICS.cbpが出来てるのをフォルダを覗いて確認。
このBULLET_PHYSICS.cbpをダブルクリックすれば、Code::Blocks(メニュー項目の日本語化作業済み)が起動する。そこでビルドターゲットを[all]にし、ビルドをクリック。10分足らずでビルド完了。0エラー6警告だった。
この後、BULLET_PHYSICS環境を整える作業を行ってビルドターゲットを[install]にセットしビルドしてねと本に書いてあったので、やってみたら、BULLET_PHYSICSフォルダの中にぽつんとlibフォルダがあった。あれヘッダーが生成されるって書いてあったけど、ないぞ…どこかでなにかを間違ったのか。サルに徹して本に書いてある通りに作業するつもりだったが、OpenGL環境の設定として示されている7つのヘッダファイルのコピー作業は同名の新しい日付のものが既にコピー先に存在したので旧いファイルはコピーしていない…そのせいか。いやあ…ちゃんとデモプログラムは出来てるし…サンプルプログラムを作ってみないと、間違ったかどうかワカラン。
デモプログラムは、こんな感じ。
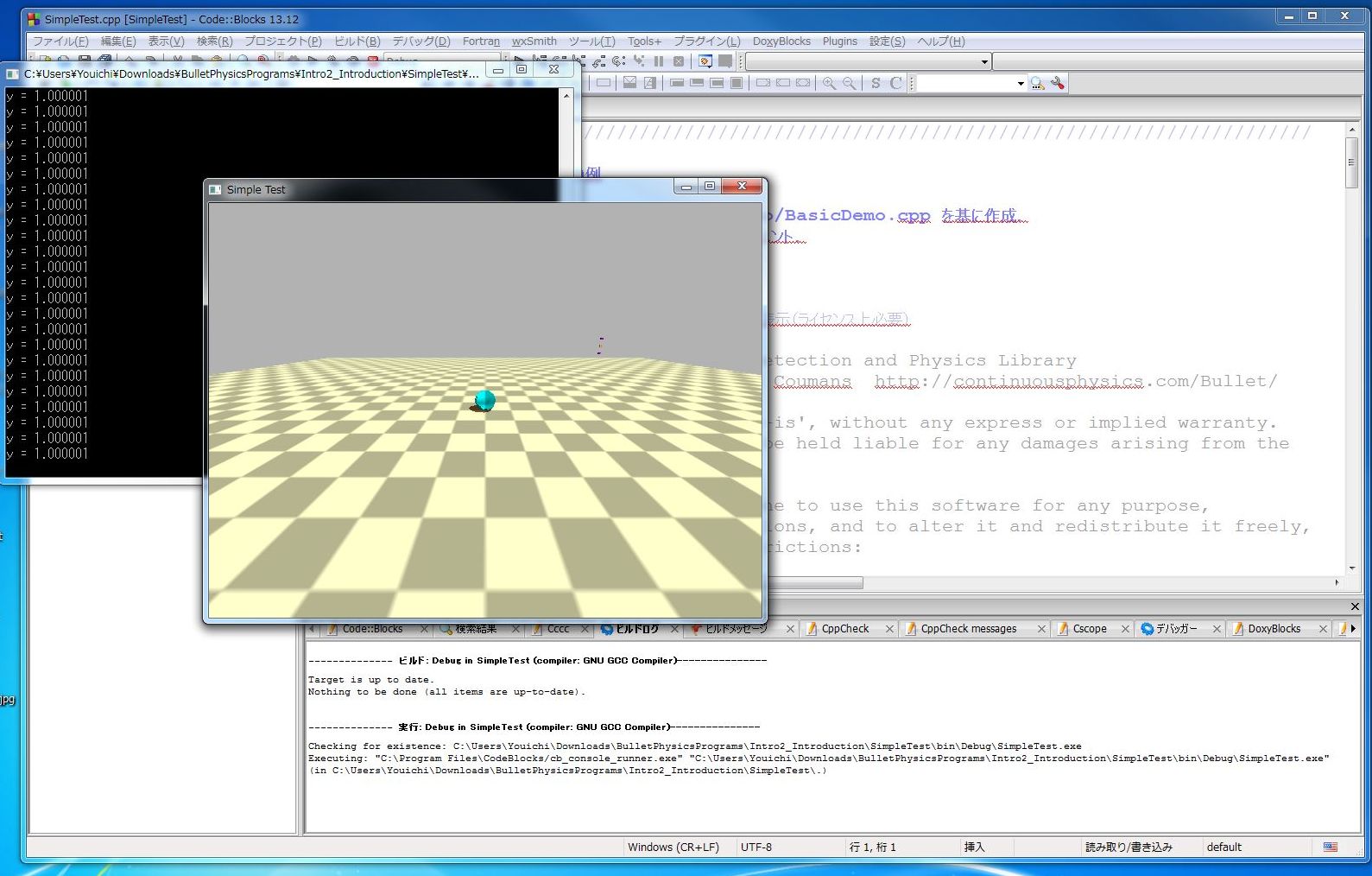
Simple Test プログラムでBullet発射 [ODEの下僕となる]
今回もBullet Physicsの話なので、ご主人様(Open Dynamics Engine)は登場しません。Code::Blocksに慣れるだけではなく、CMakeにも慣れる必要があったわけで、2度目のBullet Physicsのインストール作業を終わらせ、「Bullet Physicsではじめよう3Dモーションシミュレーション」のダウンロードサイトで提供されているサンプルプログラムSimple Testを先ほど実行してみた。
なるほどぉ~、ピリオドキーでBullet発射できるわい。
なるほどぉ~、ピリオドキーでBullet発射できるわい。
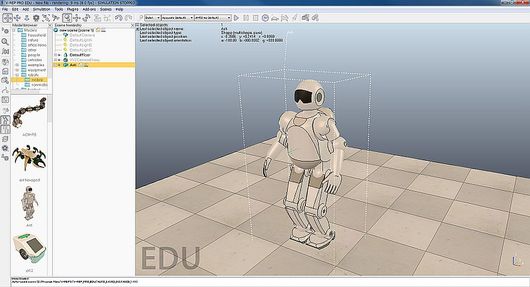
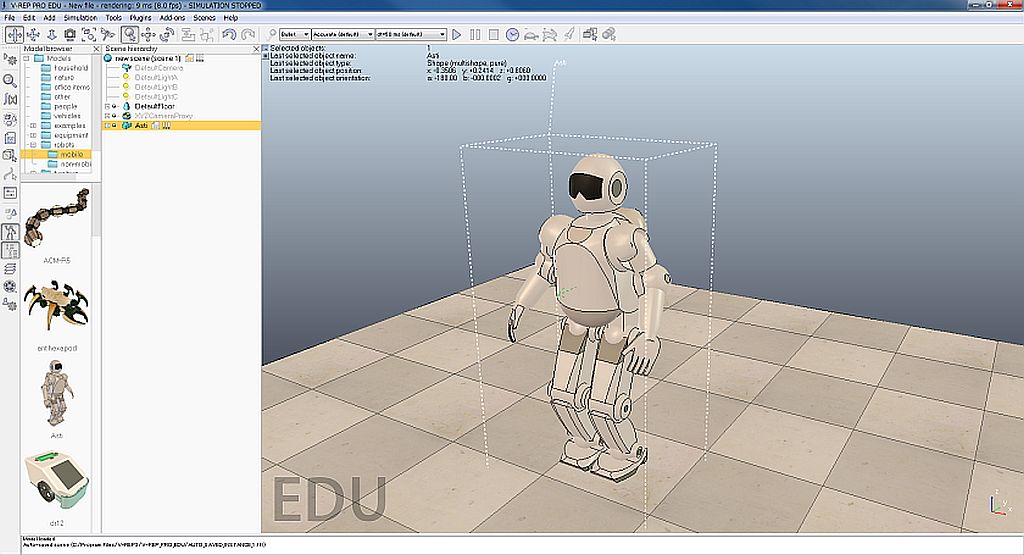
V-REP (Virtual Robot Experimentation Platform) インストール [ODEの下僕となる]
ODE Wikiに掲載されているProducts that use ODEからV-REP (Virtual Robot Experimentation Platform) を知り、なんだか面白そうなのでインストールしてみた。今のところ使い方サッパリ分からず。
Algodooは楽しい [ODEの下僕となる]
じつは、先月からAlgodooという2次元の物理演算シミュレーションソフトをインストールして、ときどき遊んでいる。前身のPhunは作例がYouTubeにたくさん転がっているので、そのスジの人々では有名だと思う。
開発元の技術力は高そうに見える。
日本では、ピタゴラ装置という名で親しまれている、Rube Goldberg machinesのようなものをインタラクティブ?に模すことが可能でシミュレーション画面に干渉(ちょっかいを出す)が可能でなかなか楽しい。
私はツマラヌものを作ってはカッタツールで斬りまくった。たとえば、こんなやつ-暑いので北海道に水をぶつけ揺さぶってみた図。どうやって動画に落とすのか良くわからんので、とりあえず静止画を貼っておく。

なお、Rube Goldberg machinesの典型は下記のページで知ることができる。
開発元の技術力は高そうに見える。
日本では、ピタゴラ装置という名で親しまれている、Rube Goldberg machinesのようなものをインタラクティブ?に模すことが可能でシミュレーション画面に干渉(ちょっかいを出す)が可能でなかなか楽しい。
私はツマラヌものを作ってはカッタツールで斬りまくった。たとえば、こんなやつ-暑いので北海道に水をぶつけ揺さぶってみた図。どうやって動画に落とすのか良くわからんので、とりあえず静止画を貼っておく。

なお、Rube Goldberg machinesの典型は下記のページで知ることができる。
面白い記事は見つかったでしょうか?下のバナーをクリックして応援してくださった方々、ありがとうございます。
Link














カワズの池

買わず 飛び込む 水の音?



