ブログランキングに参加しています。
おだててみると、ナニカオモシロイことが起きるかも知れません。
モチロン保証はいたしませんが。
写真はダウンロード可能です。お気に召した写真があれば、ご自由にお使い下さい。
ただし、写真も著作権の放棄はしておりません。
カメさんはROS-Commについて来ない [ROS on Raspberry Pi2]
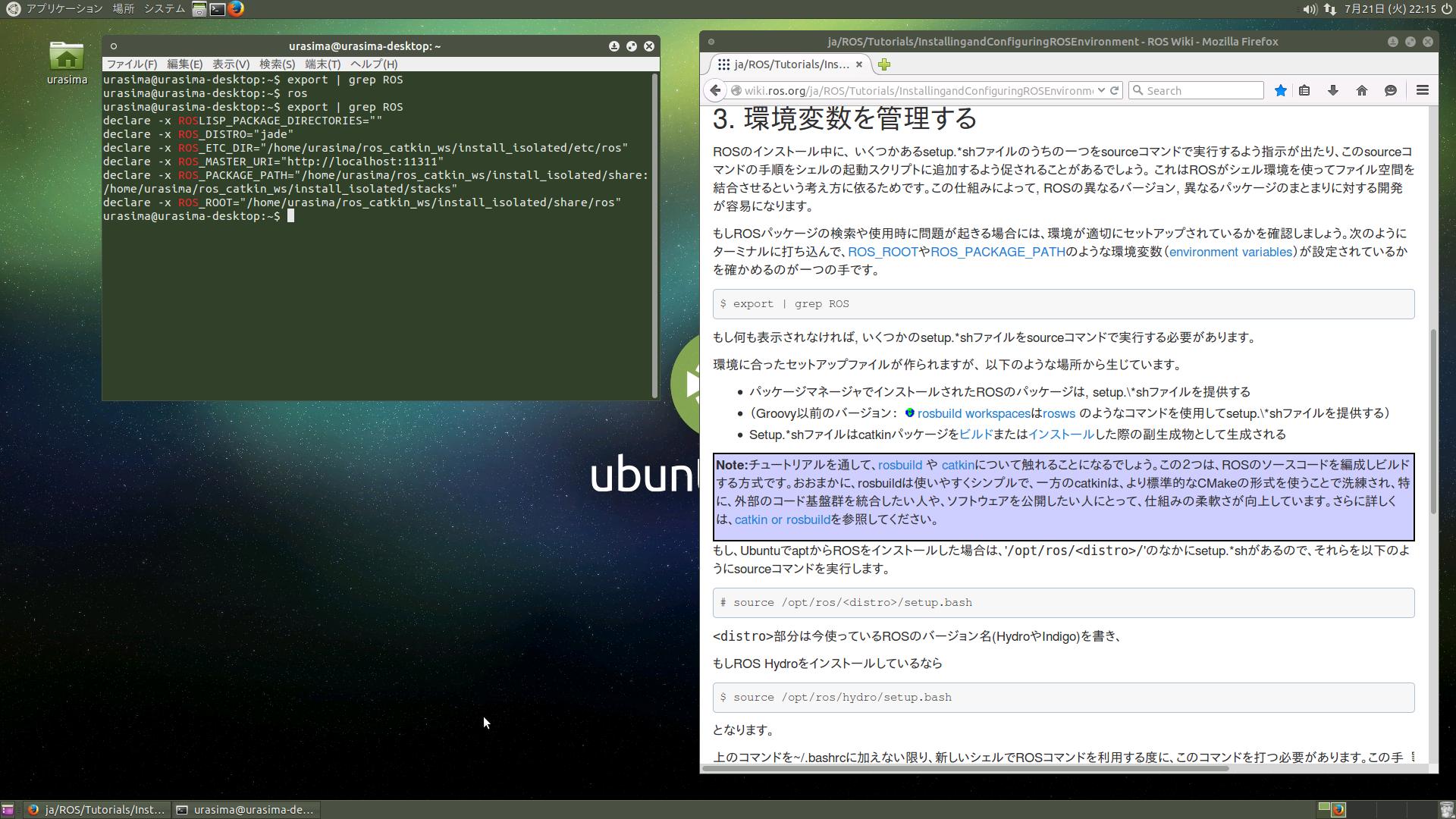
前回、ubuntu MATE 15.04をRaspberry Pi 2にインストールし、さらに[ ROS-Comm: (Bare Bones) ROS package, build, and communication libraries. No GUI tools. ] をインストールした後、roscore の起動確認のみで止まっていたので、まずはクソマジメに日本語のチュートリアルをのぞいてみた。現状は項目2に相当する[ ROS-Comm ]のインストールが終わっているにすぎない。次は「項目3.環境変数を管理する」だが ソースからインストールしたため微妙にディレクトリの名前が違ったりする。このチュートリアルにはlinux初心者にはチンプンカンプンな言葉も出現している。
ja/ROS/Tutorials には、
Linux初心者である場合: linuxの一般的なコマンドラインツールのクイックチュートリアルをまずやっておくと、ROSのチュートリアルを進めていく助けになるでしょう.
と書かれている。正論である。しかし、その前に環境セットアップは終わらせたいというのが人情であろう。ええい、やっちゃえ!の結果はごらんの通り。alias='source ~/ros_catkin_ws/install_isolated/setup.bash' を~/.bashrcに追加したので、$ ros と入力すれば、$ export | grep ROSで表示もでるし、$ echo $ROS_PACKAGE_PATHでも確認(スクリーンショットを忘れてしまった)はできた。

もちろん、カメさんはROS-Commについて来ない。最初から判ってはいたがサビシイ。どうやってパッケージ追加すればいいのかワカランもんね。とりあえず、下の参考書にそってどこまでできるかを試そうとしているので、ubuntu MATE での作業はここで一時中断する。やはり、ソースからインストールするのは のっとりこめんでっど である。
とーしろーのくせに、と思われたかたもいらっしゃるかと存ずるが、とーしろーだから こゆことするんだもんね。



")
のことです。
ja/ROS/Tutorials には、
Linux初心者である場合: linuxの一般的なコマンドラインツールのクイックチュートリアルをまずやっておくと、ROSのチュートリアルを進めていく助けになるでしょう.
と書かれている。正論である。しかし、その前に環境セットアップは終わらせたいというのが人情であろう。ええい、やっちゃえ!の結果はごらんの通り。alias='source ~/ros_catkin_ws/install_isolated/setup.bash' を~/.bashrcに追加したので、$ ros と入力すれば、$ export | grep ROSで表示もでるし、$ echo $ROS_PACKAGE_PATHでも確認(スクリーンショットを忘れてしまった)はできた。

もちろん、カメさんはROS-Commについて来ない。最初から判ってはいたがサビシイ。どうやってパッケージ追加すればいいのかワカランもんね。とりあえず、下の参考書にそってどこまでできるかを試そうとしているので、ubuntu MATE での作業はここで一時中断する。やはり、ソースからインストールするのは のっとりこめんでっど である。
とーしろーのくせに、と思われたかたもいらっしゃるかと存ずるが、とーしろーだから こゆことするんだもんね。
ROSではじめるロボットプログラミング―フリーのロボット用「フレームワーク」 (I・O BOOKS)
- 作者: 小倉 崇
- 出版社/メーカー: 工学社
- 発売日: 2015/06
- メディア: 単行本
のことです。
2015-07-21 23:20
nice!(0)
コメント(0)
面白い記事は見つかったでしょうか?下のバナーをクリックして応援してくださった方々、ありがとうございます。
Link














カワズの池

買わず 飛び込む 水の音?




コメント 0