ブログランキングに参加しています。
おだててみると、ナニカオモシロイことが起きるかも知れません。
モチロン保証はいたしませんが。
写真はダウンロード可能です。お気に召した写真があれば、ご自由にお使い下さい。
ただし、写真も著作権の放棄はしておりません。
グリースアップ [日記]


とはいえ、このチッコイグリースガンはお買い得だった。紹介しておきたい。なお、グリースアップしたのは自転車用グリースではなく、極圧グラファイトグリースを選択していることを付け加えておく。

- 出版社/メーカー: AZ(エーゼット)
- メディア: スポーツ用品
天板にタッチダウン [日記]


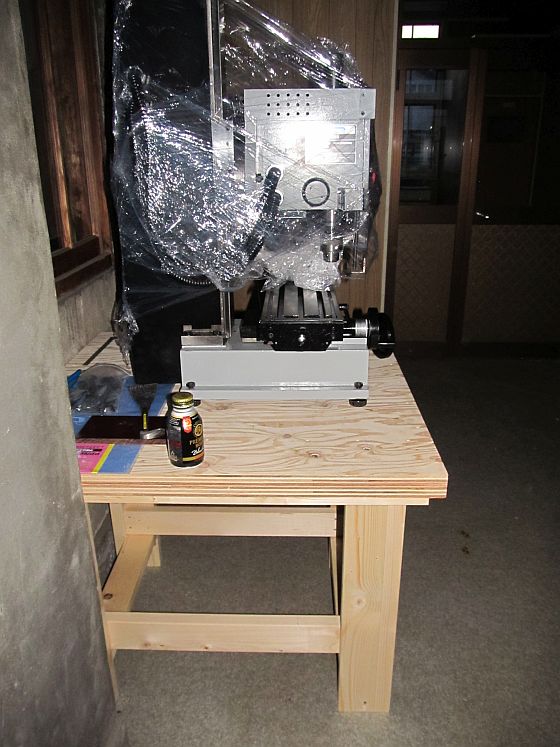
作業中に雪が降ってきた。BB弾くらいのアラレだった。敷板をあらかじめ準備して作業を進め、なんとか天板にタッチダウンさせて、昨日の作業は終了。





しかし、なんとも位置のバランスがよろしくない。そこで、今日はもう少し中央に寄せることにして作業を行った。
フットボルトを使うことでZ軸ハンドルと天板の干渉は解消され、移動可能になったわけだが専用台を使用せずにマニュアルの記載事項どおりに天板とボルトで固定するにはフライス盤に下駄を履かせるような細工が必要となる。
見た目は安定しているような位置に設置してはみたものの、やはり地震が恐ろしいので早急に地震対策が必要だ。と日記に書いておく。

木枠梱包から離脱 [日記]

とりあえず、梱包木枠の台座ごと作業台に載せれば、後はナントカなるだろうと思いやってみた。本日購入のM12×80ボルトを使い梱包木枠から浮かせ付属品のフットボルトを取り付けるところまではできるのではないかと思い作業を始めた。



2時間ほど作業したが予想以上に手間取り僅かに浮かせた状態で本日の作業終了。集中力は2時間が限度なので、安全に作業を進めるためにはゆっくり作業したほうが良いのだ。ほんとは日が暮れたので、ビール飲みたくなったんだろっと勘ぐる人がいるかも知れぬが、人がココロに思うことは誰にも止められないので、放っておこう。
小型卓上フライス盤(PSF550-VDR)到着 [日記]
昨日、あわてて受入れ場所の整理を行った甲斐があり搬入作業は順調、数分で終わった。3年前に購入していたハンドリフターと、今年の夏出来上がった台車が役に立った。

開梱はいったん載せた台車から、自作の小さなパレットに載せ換えて行った。木枠梱包のイメージが20年以上も昔のままだったため、馬鹿でかいバールを準備していたが、実際に使用したのは300mm程度の内装工事用のバールのようなものだった。これで充分だった。



中身を確認した後、据付というのが普通の作業手順だが、実はどうやって作業台に載せればいいのか考えてはいたのだが良い方法が思いつかずにいた。ということで、本日は発注した物品リストとの照合で作業終了。
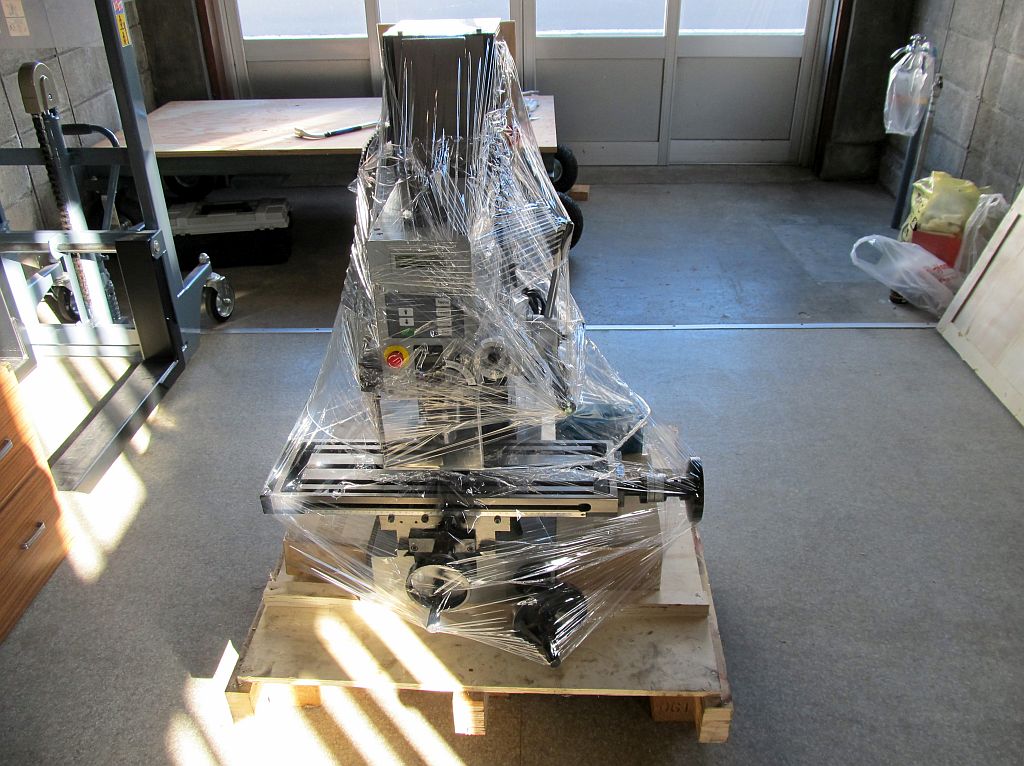

据付のため、また出費がかさむような気がするが今夜は考えないようにしよう。と、日記には書いておくのだ。
小型卓上フライス盤が欲しい [日記]
というわけで、木製のマシンスタンドを作ることにした(冷静な判断力が維持できていれば、専用台を購入したはずだが…)。材料費はコンパネと2×4材、木ねじで一万円もあれば充分。鋸だって2000円程度でそこそこ良いものが手に入る。自作すれば、安上がりじゃん♪
さて実際に2×4材を鋸で切ってみると、2×4材はおおむね曲がったりねじれたりしているので基準面をどこにして加工したか忘れてしまうと組立てたとき誤差が集中してしまう場所が出てくる。しかも、鋸の扱いがへたくそなので直角に切断できないという現実を突きつけられた。しかたが無い、ジグを購入しよう(プライドは溝に捨てた)。ネットでいろいろ物色したら、良さそうなものが見つかったので2種類購入することにした。下の左側は国産品(金属製)でしかも鋸付き。右側はスウェーデン製(プラスチックボディに磁石三個付き)。


国産のもの(4261円)は縦引き・横引きに対応していて付属品も多くお買い得感がある。サブロクのコンパネを真っ二つにするとき縦引きガイドが役に立った。スウェーデン製のほうはクロスカット専用。軽く、正確な切断が可能。送料が高くつくのが玉に瑕(本体+送料で8000円程度)。
さらにクランプを数セット購入したので6000円ほどの出費。曲尺や、スコヤ、墨つぼだって必要なわけで鉋を入れると軽く一万円を超える。したがって、作業中に余計なことを考えなくても自作する費用は専用台の価格を超えることになる。私は暇なものだから、木工用ワークベンチが自作の参考になるのではと考えたりして参考書を買ったり、金具を購入したりしたので下のマシンスタンドを作ろうと考えてから出費は既に5万円を超えてしまった。愚かである。私は穴が欲しいのではない、ドリルが欲しいのだった。

秋月の300円ウェブカメラを試す [日記]
日中、屋外、好天であれば屋内に設置して屋外監視カメラとして使えるかも知れない。あるいは何かもっとふさわしい用途があるような気もするが、気の迷いかもしれない。
ROS でUSBWebcam を使う準備 [ROS on Raspberry Pi2]
")
↑参考書↑の内容を[ ROS/Jade on Raspberry Pi 2 with Xubuntu ] の環境下でどの程度試すことができるのかという好奇心で、参考書を読み進めてきた。今回やっと外部デバイスの接続である。
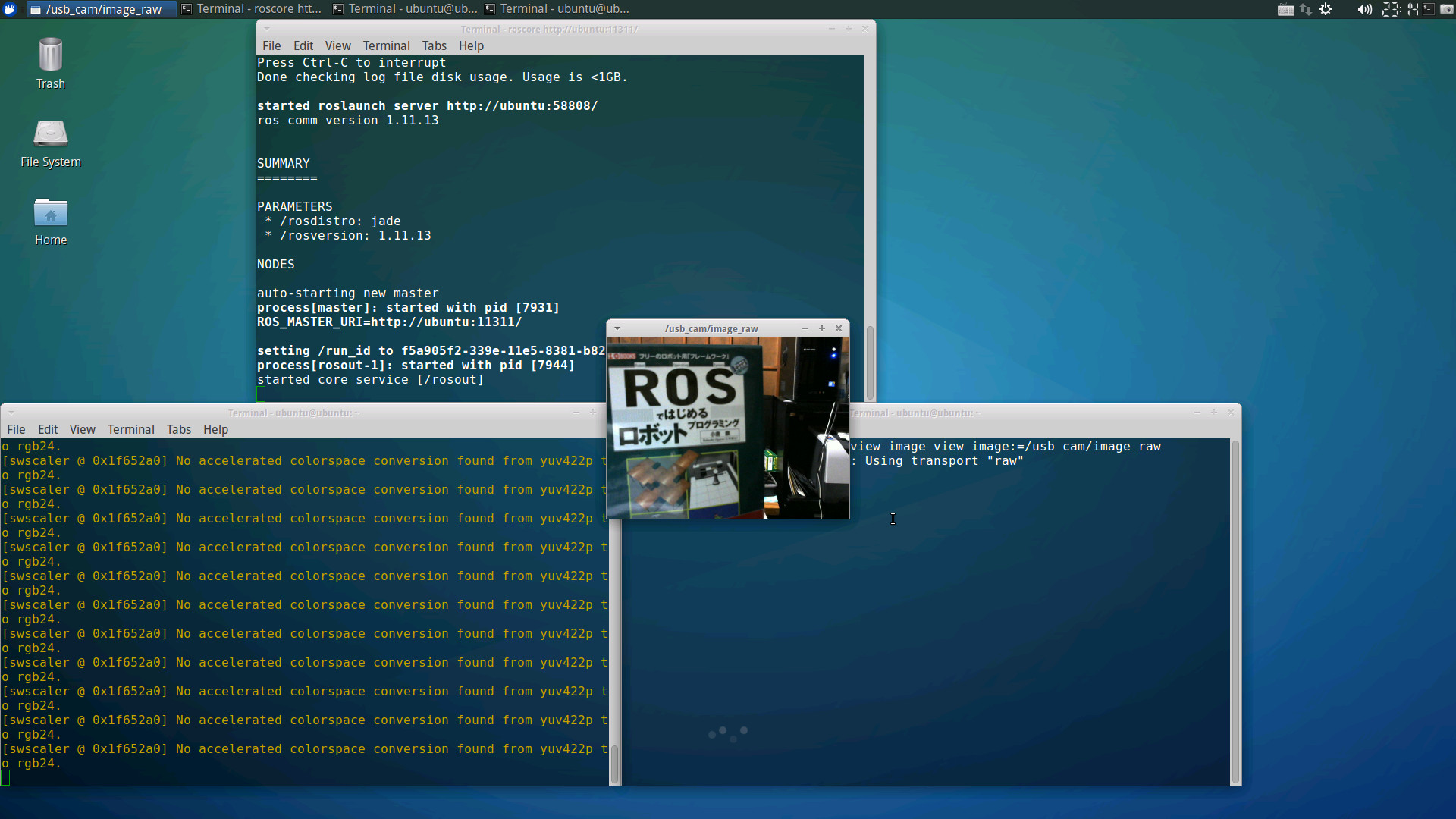
第17章 「ROS」を使って「分散画像処理」のうち、17.1「USBカメラ」準備 だけは確認できた。
「USBカメラ」の「ROSドライバ」をインストールして、
$ rosrun usb_cam usb_cam_node
$ rosrun image_view image_view image:=/usb_cam/image_raw
を実行しょうとしたら、当然のごとくエラーが出た。なんちゃらパッケージが足りないというような、ご託宣があった。
仕方なく、Ubuntu ARM install of ROS Jadeを参考に、
$ apt-cache search ros-jade
して関係のありそうなものを適当に(<こら、こら)みつくろって追加インストールしたところ、とりあえずカメラ画像は表示できた。下に証拠写真を示す。
使用したUSBカメラはこれ。

LOGICOOL ウェブカム HD画質 120万画素 C270
- 出版社/メーカー: ロジクール
- メディア: Personal Computers
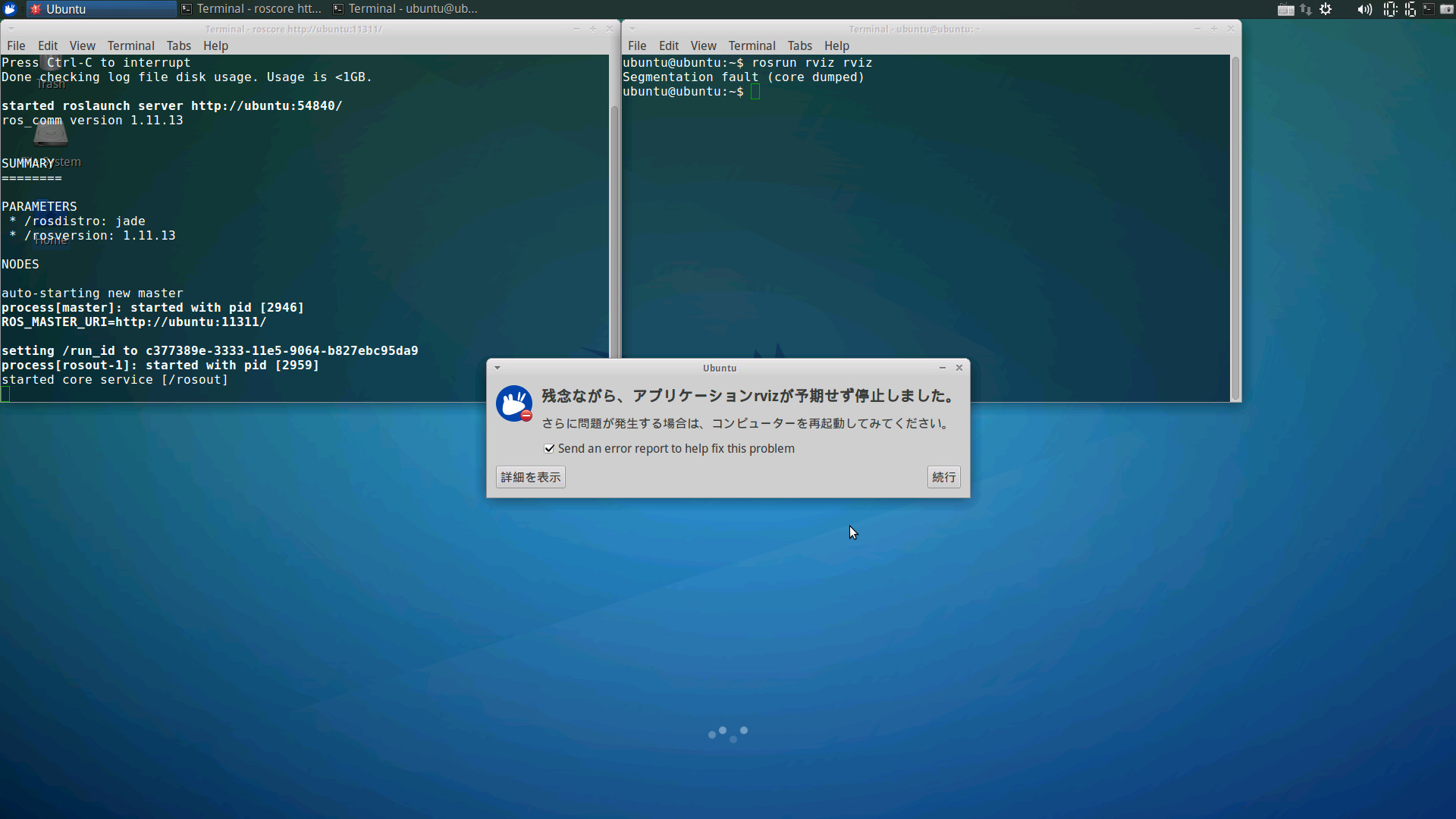
rviz は走らないけど rqt は走る [ROS on Raspberry Pi2]
↑参考書↑の内容を[ ROS/Jade on Raspberry Pi 2 with Xubuntu ] の環境下でどの程度試すことができるのか確認する作業も終盤にさしかかった。
rviz robot などのパッケージをインストールしていないため、[ kobuki ]が関連するプログラムは確認できないので、
当然すっ飛ばすことになった。
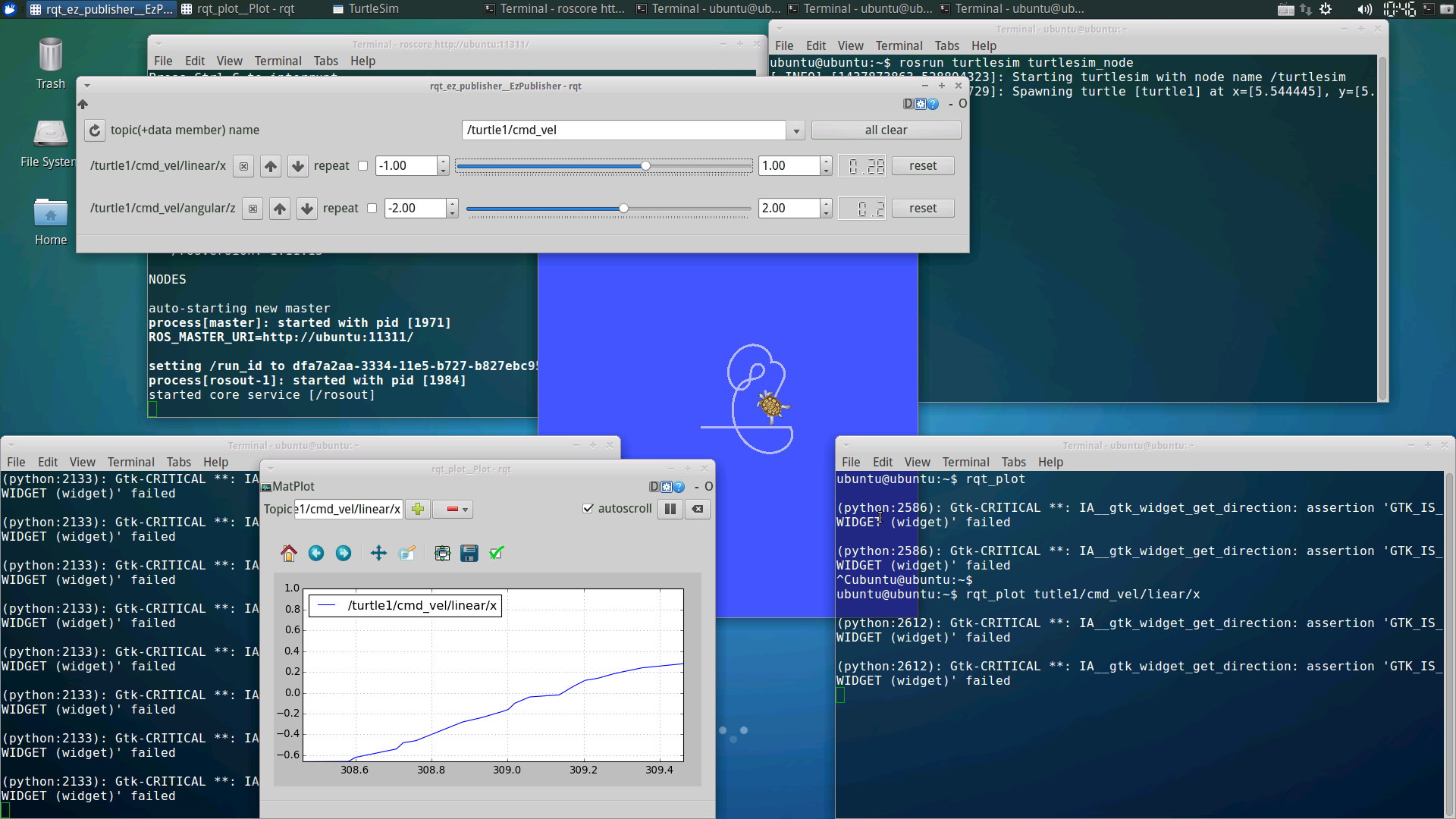
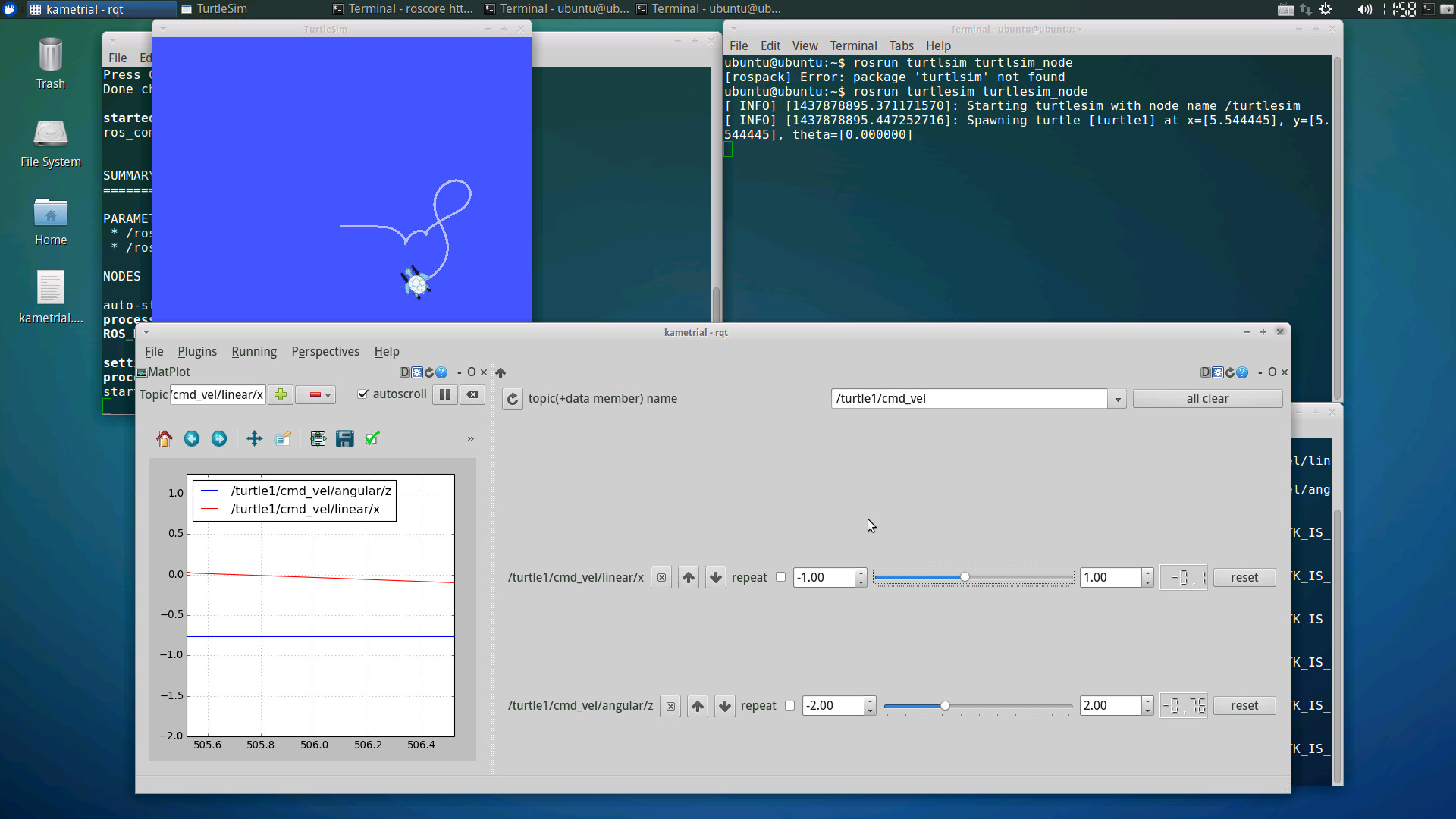
今回は第10章、第13章(rvizの項を除く)の確認ができた。作業中の画面は下の通り。
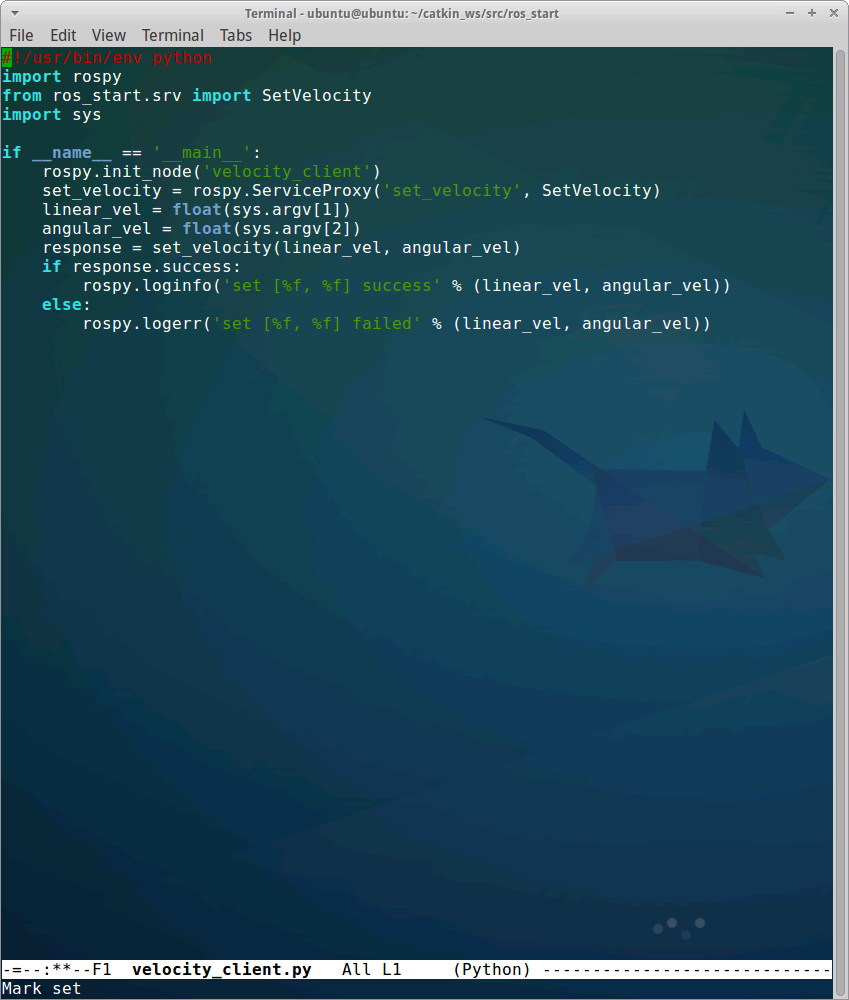
Emacsを使ってファイルの内容を確認

どうなるか怖いもの見たさでrvizを呼んだ結果。
久しぶりのカメさん登場。
![]()
![]()
![]()
Emacsを導入してみた [ROS on Raspberry Pi2]
↑参考書↑のトレース作業を飽きもせず、続けている。今回行った作業は次の通り。
第8章 「シミュレータ」上の「ロボット」を動かす
は私の環境[ ROS/Jade on Raspberry Pi 2 with Xubuntu ] ではパッケージがロケートできませんとか言われちゃって、「kobuki」のインストールができなかったため、すっ飛ばすことになり、
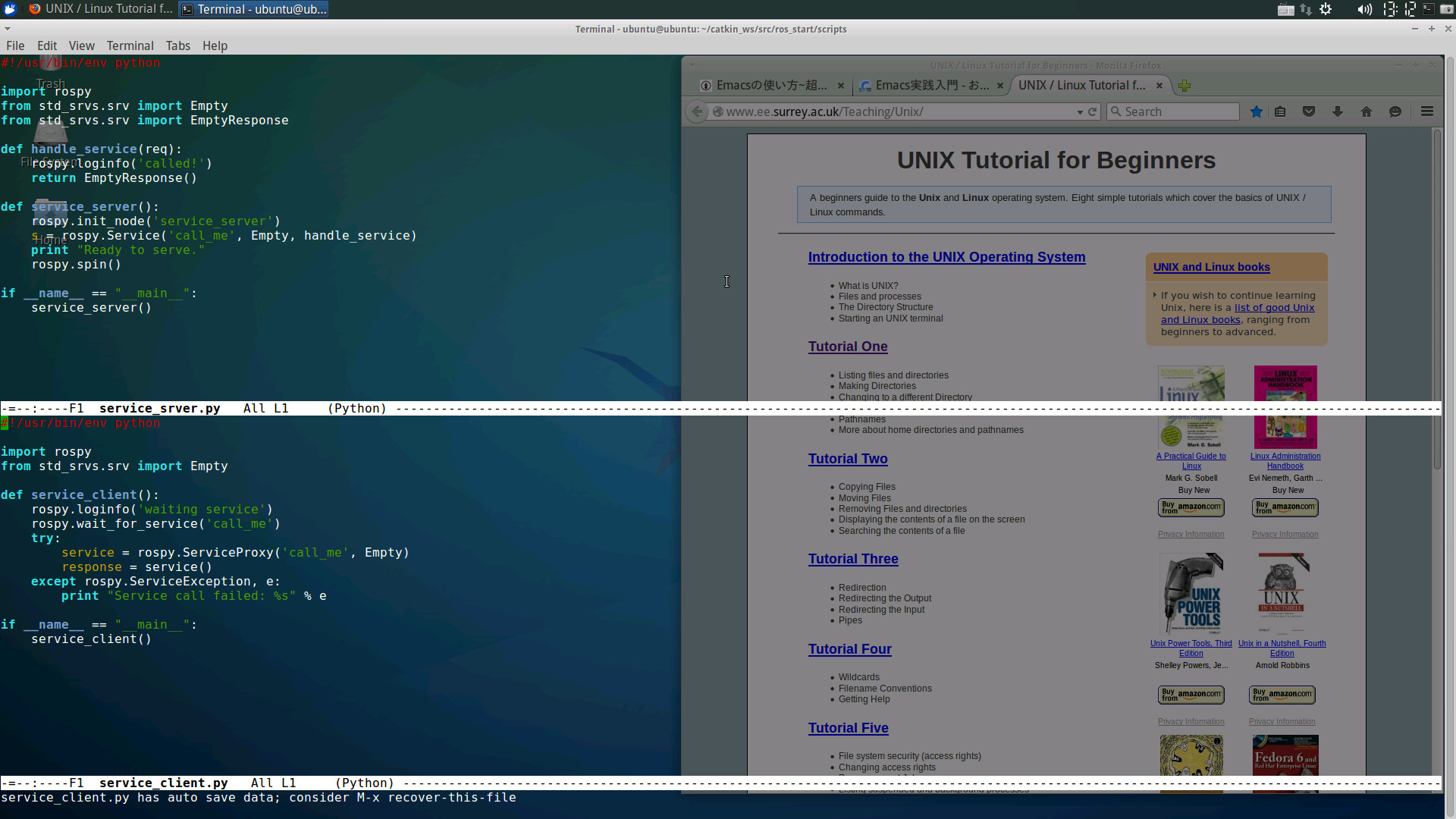
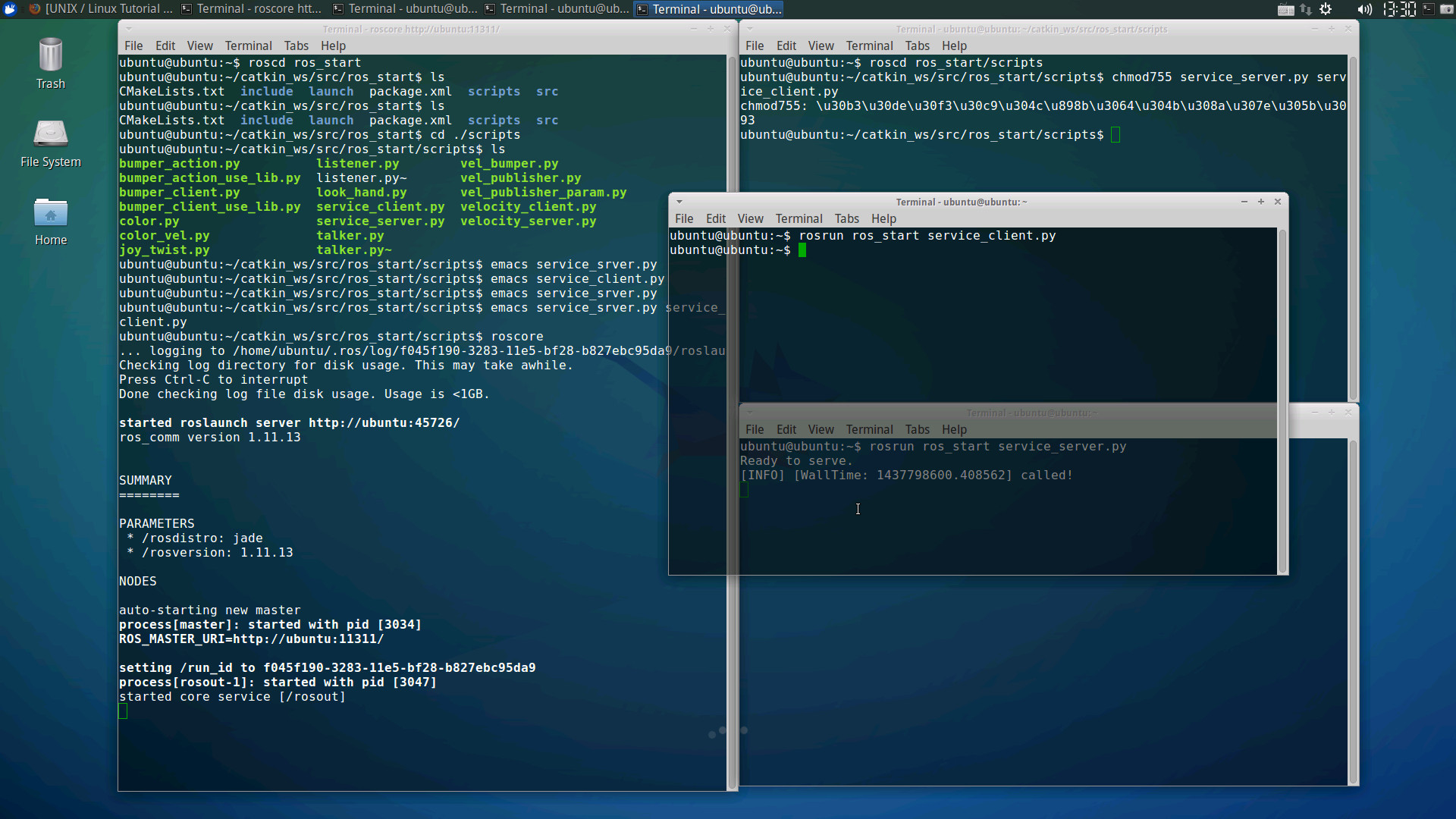
第9章 「Service」を理解する
を確認できた。なお、今回からエディタのGeditに不満があるわけではないが、新たにEmacsを導入し、使い方を学習しながら作業を続ける予定である。さらに、参考書のサンプルプログラムをダウンロードして動作確認に利用した。
ターミナルの設定を変えたので、ターミナルウィンドウがたくさん開いてもそこそ中が見えるようになった。
![]()
![]()
![]()
「ROS」のプログラムを書く [ROS on Raspberry Pi2]
今回は、↑参考書の
第7章 「ROS」のプログラムを書く
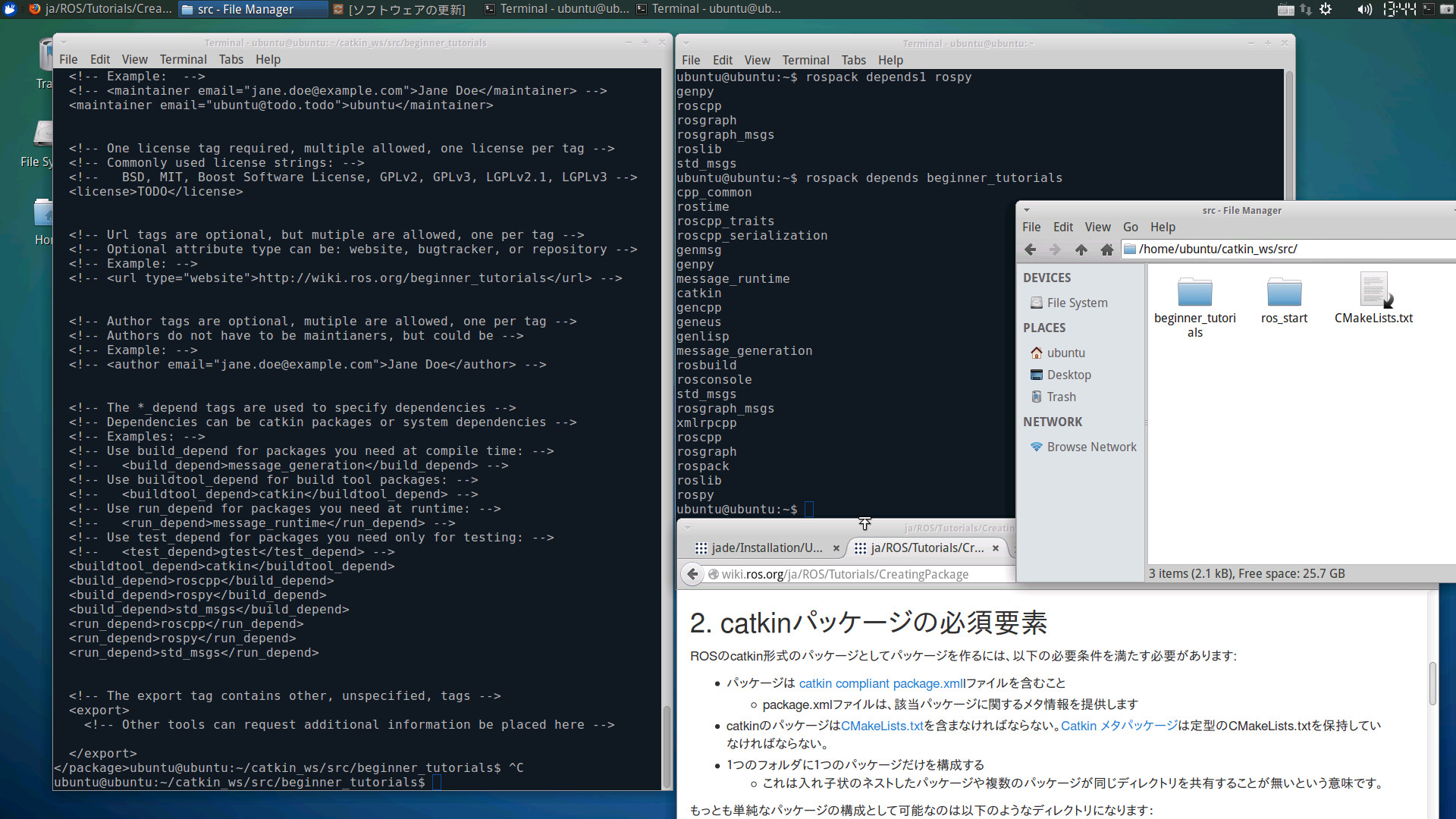
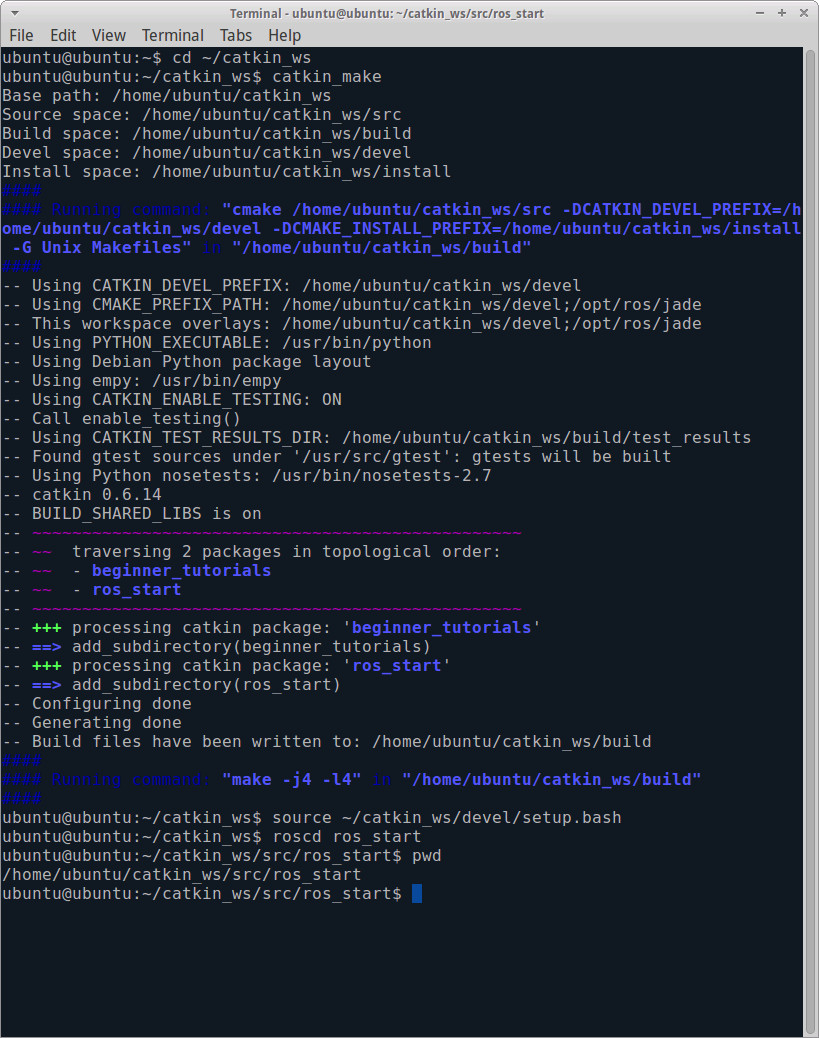
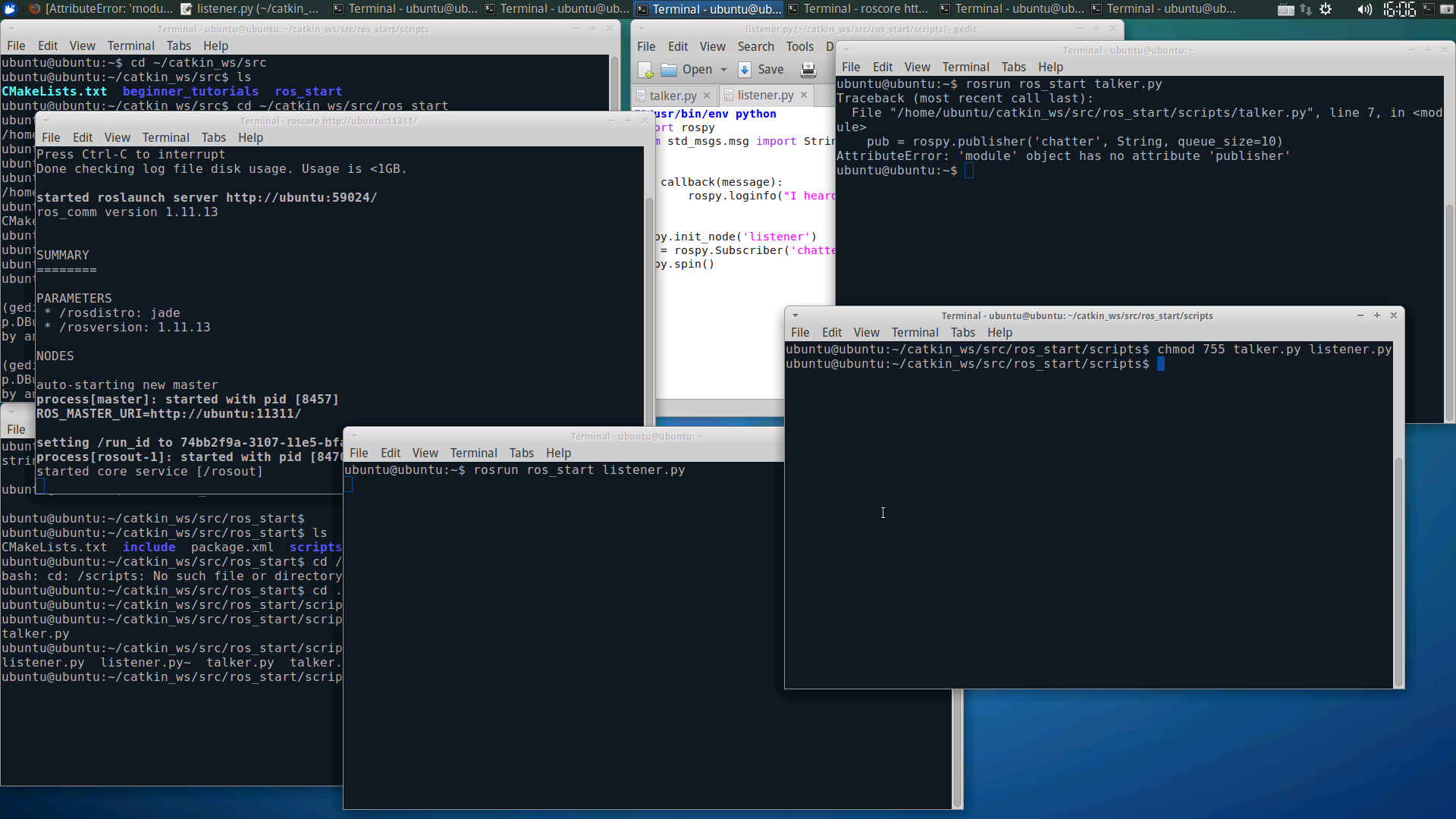
を ja/ROS/Tutorials を横目で見ながら、実際にやってみた。参考書の第7章が、ほぼ ja/ROS/Tutorials の[ 1.初級 ] に対応しているようだ。 ja/ROS/Tutorials の内容を試しつつ、参考書も読み進めた作業中の画像は下の通り。
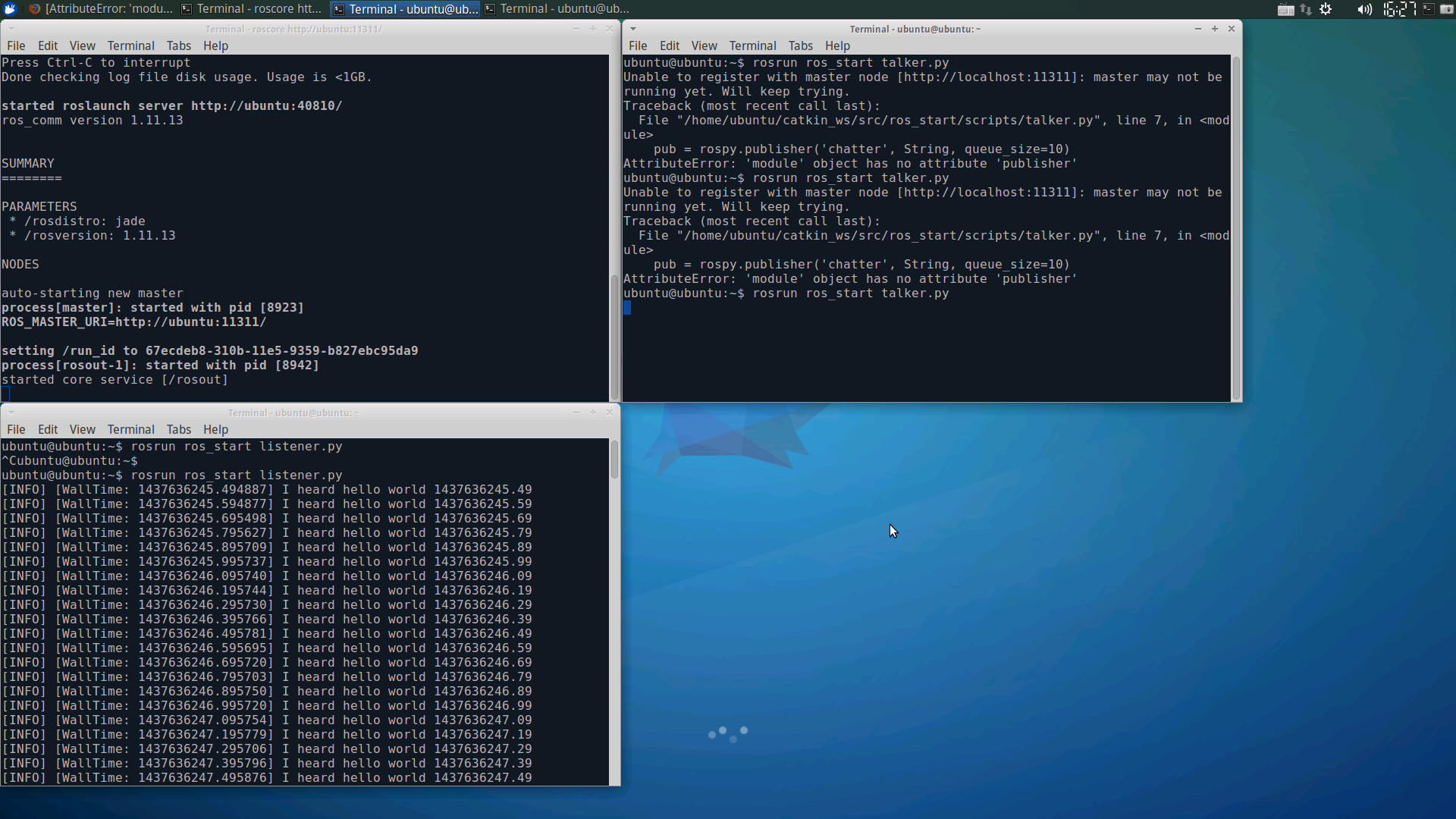
エラー発生。エディタは参考書と同じgeditを使用。talker.py というファイルに問題があるようだ。あ、もしかして大文字なのかい、publisher をPublisherに修正して実行。
今度は参考書通り。第7章の最後まで確認できた。
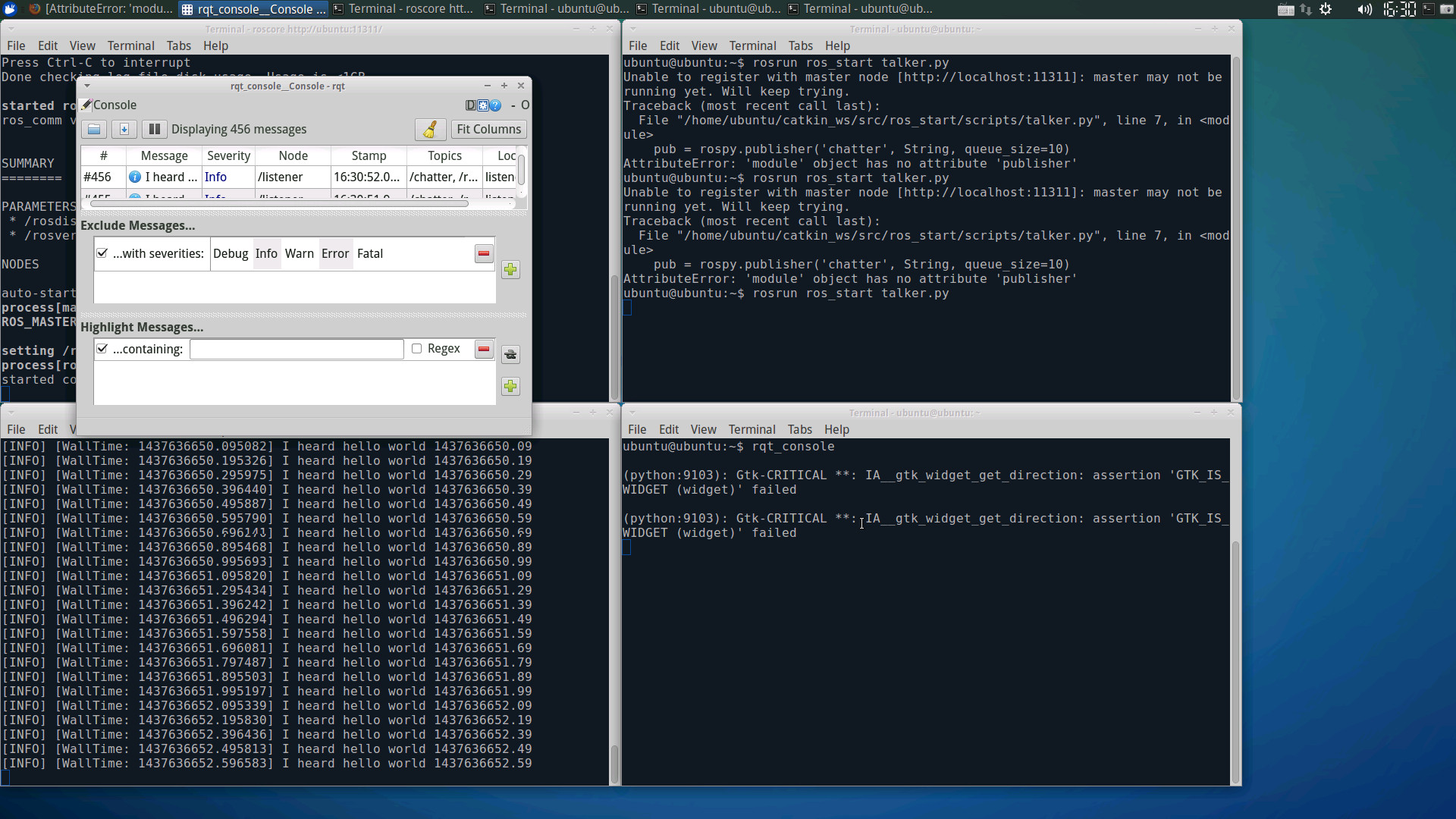
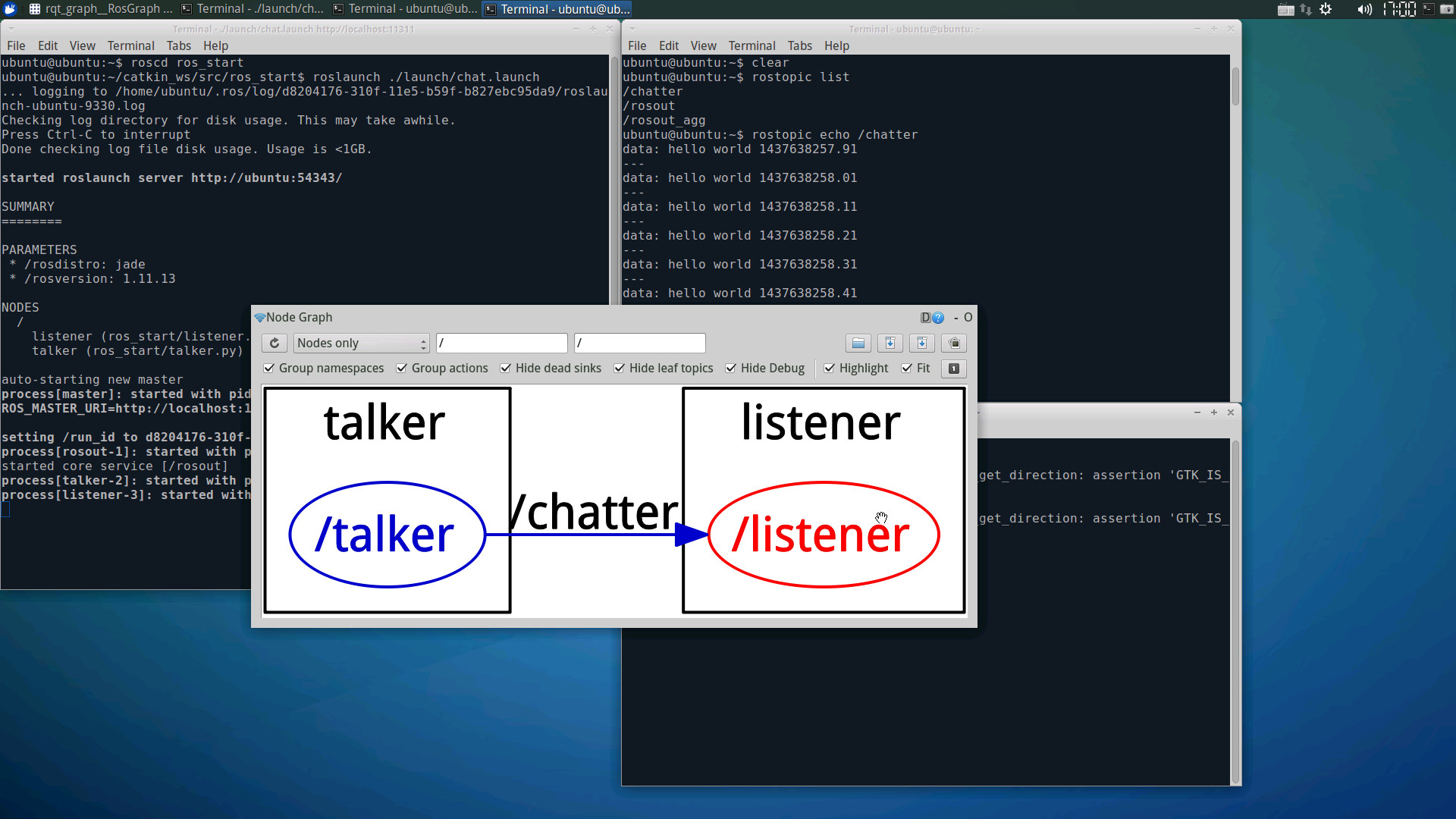
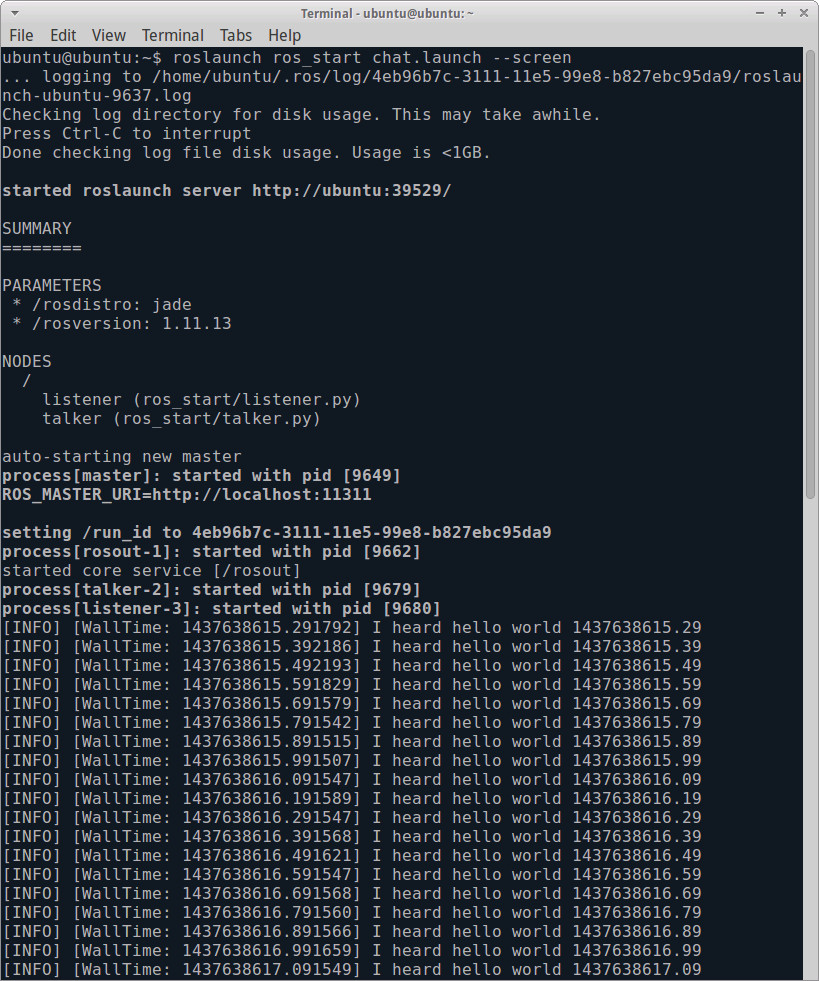
ここから先の第8章以降の確認が難しいんだよなあ。なにしろインストールしてあるパッケージが少ないし、Rasberry Pi 2だけでは3Dグラフィクス扱いきれんものなあ。
![]()
![]()
![]()
面白い記事は見つかったでしょうか?下のバナーをクリックして応援してくださった方々、ありがとうございます。
Link














カワズの池

買わず 飛び込む 水の音?



