ブログランキングに参加しています。
おだててみると、ナニカオモシロイことが起きるかも知れません。
モチロン保証はいたしませんが。
写真はダウンロード可能です。お気に召した写真があれば、ご自由にお使い下さい。
ただし、写真も著作権の放棄はしておりません。
Ubuntu ARM install of ROS Jade [ROS on Raspberry Pi2]
前回Raspberry Pi 2にXubuntuをインストールし[ROS Indigo-Igloo]を試した際、てきとーに作業したためROSのパッケージが不足していたようで、カメさんは出てきたが、この参考書の続きを試せなかった。
ROSではじめるロボットプログラミング―フリーのロボット用「フレームワーク」 (I・O BOOKS)
いかんせん、初心者なのでどのパッケージが必要なのか個別インストールではわからなかったのだ。参考書ではdesktop-full の全部入りを奨めているが、Raspberry Pi 2には荷が重い。そこで、Installing ROS Indigo on Raspberry Piの記事にすがりつき色々試してみたが、ROS-Comm: (recommended) ROS package, build, and communication libraries. No GUI tools. というお任せパッケージしかインストールは成功しない。Desktop: ROS, rqt, rviz, and robot-generic libraries はパッケージが壊れてますみたいなメッセージが出て失敗。しかもむちゃくちゃ時間がかかる。このパッケージからrviz, and robot-generic libraries を取り去ってインストールする方法がわかれば何とかなるハズ。だがワカラン。Raspberry Pi b+でも試したがコンパイル終盤でエラーが発生してDesktopのインストールは失敗。しかも、Raspberry Pi 2でいったんインストール成功したROS-CommのマイクロSDカードが壊れたらしく。翌日起動したら、ワケワカラン画面が出現してこれ以上は無理とかぬかすので、力が抜けた。しかし、カンタンにあきらめるようなことはできない性分なので、今度はUbuntu MATE 15.04にすり寄ってRaspberry Pi 2で試してみた。しかし、撃沈されてしまった。(このUbuntu MATE 15.04は見た目が派手でかっこいいため未練たっぷり。したがって再チャレンジ予定。)
こういう愚かなことを繰り返し、ヤケクソになって今回はRaspberry Pi 2+Xubuntu 上でUbuntu ARM install of ROS Jadeを試すことにした。つまり、新しいカメさんに乗り換えようというわけである。インストール作業はROS-Baseを入れた後、Xubuntuのターミナルエミュレータ上で
sudo apt-get install ros-jade-desktop
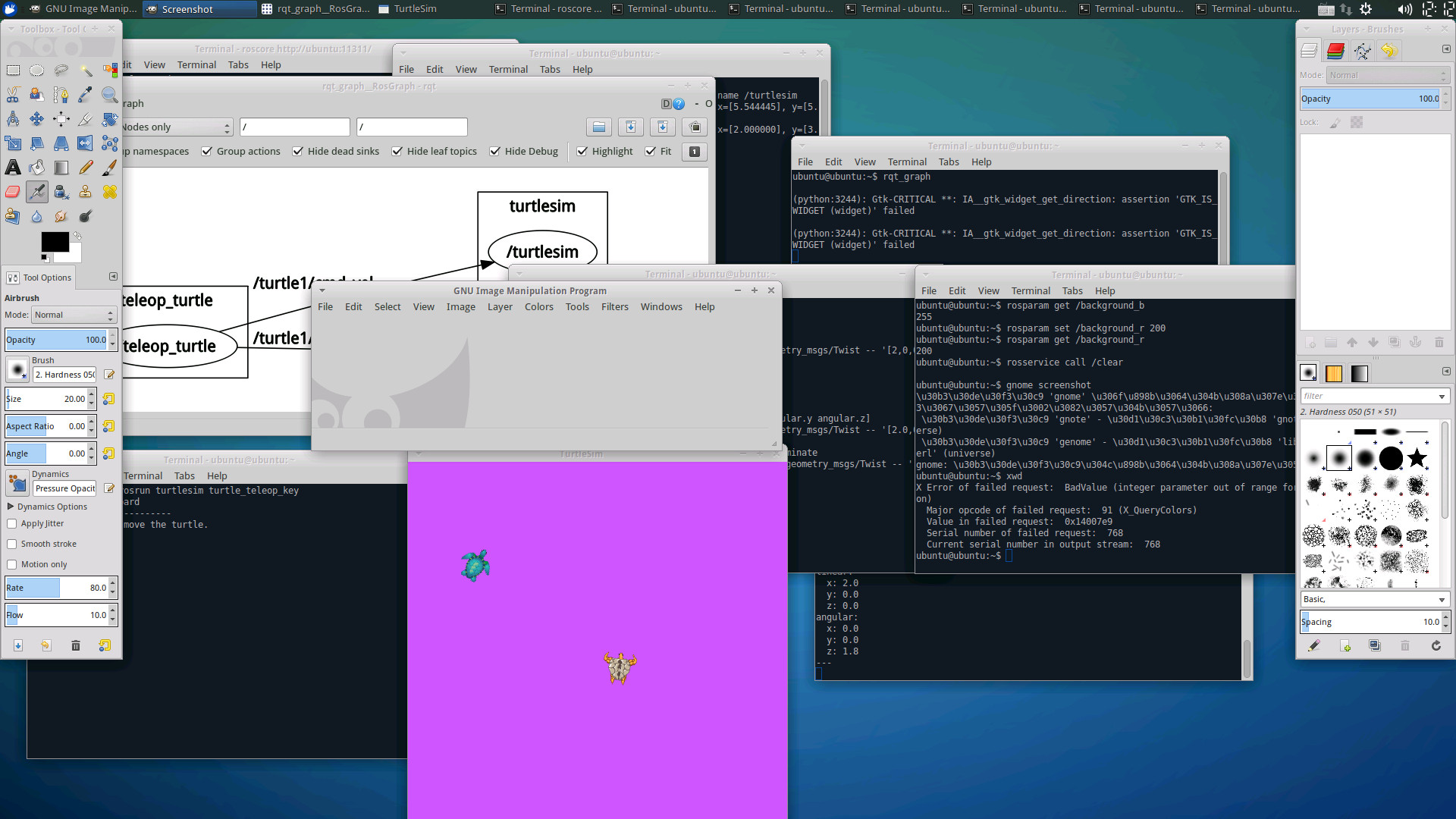
を実行。こうしてなんとか参考書の第5章までは動作確認できた。カメさんが2匹いてバックグラウンドが赤(というよりピンクかな指定値どおり200にしたんだけどね)に変わっているのが前回との違いです。
今回は画面撮影ではなく、Raspberry Pi 2+Xubuntu でスクリーンショットしこのブログへアクセスして画像アップロードしました。GIMPのツールがかぶってますが、そこはご笑覧あれ。



ROSではじめるロボットプログラミング―フリーのロボット用「フレームワーク」 (I・O BOOKS)
いかんせん、初心者なのでどのパッケージが必要なのか個別インストールではわからなかったのだ。参考書ではdesktop-full の全部入りを奨めているが、Raspberry Pi 2には荷が重い。そこで、Installing ROS Indigo on Raspberry Piの記事にすがりつき色々試してみたが、ROS-Comm: (recommended) ROS package, build, and communication libraries. No GUI tools. というお任せパッケージしかインストールは成功しない。Desktop: ROS, rqt, rviz, and robot-generic libraries はパッケージが壊れてますみたいなメッセージが出て失敗。しかもむちゃくちゃ時間がかかる。このパッケージからrviz, and robot-generic libraries を取り去ってインストールする方法がわかれば何とかなるハズ。だがワカラン。Raspberry Pi b+でも試したがコンパイル終盤でエラーが発生してDesktopのインストールは失敗。しかも、Raspberry Pi 2でいったんインストール成功したROS-CommのマイクロSDカードが壊れたらしく。翌日起動したら、ワケワカラン画面が出現してこれ以上は無理とかぬかすので、力が抜けた。しかし、カンタンにあきらめるようなことはできない性分なので、今度はUbuntu MATE 15.04にすり寄ってRaspberry Pi 2で試してみた。しかし、撃沈されてしまった。(このUbuntu MATE 15.04は見た目が派手でかっこいいため未練たっぷり。したがって再チャレンジ予定。)
こういう愚かなことを繰り返し、ヤケクソになって今回はRaspberry Pi 2+Xubuntu 上でUbuntu ARM install of ROS Jadeを試すことにした。つまり、新しいカメさんに乗り換えようというわけである。インストール作業はROS-Baseを入れた後、Xubuntuのターミナルエミュレータ上で
sudo apt-get install ros-jade-desktop
を実行。こうしてなんとか参考書の第5章までは動作確認できた。カメさんが2匹いてバックグラウンドが赤(というよりピンクかな指定値どおり200にしたんだけどね)に変わっているのが前回との違いです。
今回は画面撮影ではなく、Raspberry Pi 2+Xubuntu でスクリーンショットしこのブログへアクセスして画像アップロードしました。GIMPのツールがかぶってますが、そこはご笑覧あれ。
2015-07-16 15:15
nice!(0)
コメント(0)
面白い記事は見つかったでしょうか?下のバナーをクリックして応援してくださった方々、ありがとうございます。
Link














カワズの池

買わず 飛び込む 水の音?




コメント 0